Geography Reference
In-Depth Information
7.2.2 LiDARfor aquaticsurfaces
where
P
s
denotes the power returned by the water sur-
face, and
P
bsc
(
d
) denotes the power returned by the
water column at a given depth
d
. Consequently, the
total water column distribution
P
bsc
is computed through
Equation (7.1):
LiDAR sensors designed for surveys over aquatic areas are
called bathymetric hydrographic LiDARs, or ALB for Air-
borne LiDAR Bathymeters. These LiDARs were primarily
developed to survey across the land-water boundary in
near-coastal areas, but since 2005, there has been an
increasing use of these systems in riverine environments.
P
bsc
=
P
bsc
(
d
)
.
dd
(7.3)
P
b
denotes the power returned from the bottom;
P
bg
is the
background power coming from sunlight or backscatter
in the air; and P
N
is the power from system noise.
More detailed formulations can be found in Tulldahl
and Steinvall (2004). A number of authors expound on
these complex physical equations and describe each of
the interdependent components (e.g., Guenther, 1985;
Jurand et al., 1989; Tulldahl and Steinvall, 1999, 2004;
Zege et al., 2004).
The first condition controlling the shape of each com-
ponent is the typically Gaussian form of the transmitted
pulse
P
T
(
t
) itself. Indeed, the LiDAR waveform and com-
ponent forms result from the convolution product of
P
T
(
t
), with the range of target backscatter properties for
targets encountered by the laser corresponding to time
t
.
Optical properties such as scattering and attenuation
increase the diameter of the pulse and bias towards the
7.2.2.1 Physical equations
Compared to LiDARs used for terrestrial surfaces, bathy-
metric LiDARs use a green wavelength (532 nm) to
penetrate the water surface with minimal optical atten-
uation. The relevant portion of the bathymetric LiDAR
signal corresponds to a back-scattered waveform, which
usually contains two peaks, typically indicating water sur-
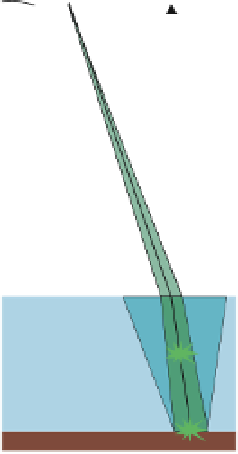
face and bottom reflections. A schematic description of
this system is shown in Figure 7.2a
When considering only the green signal, the foundation
equations of the collected signal power
P
by the receptor
for an emitted pulse can be stated as a sum of four
dependent components (Guenther, 1985; Jurand et al.,
1989), as in Equation (7.1):
P
=
P
s
+
P
bsc
+
P
b
+
P
bg
+
P
n
(7.2)
P
bg
H
Afov
Ao
P
s
Air
P
bsc
P
Water
D
Aw
P
b
Soil
Figure 7.2a
A scheme of the bathymetric LiDAR system (green laser) and main components convolving to the LiDAR waveform.
Courtesy of Airborne Hydrography AB.





















Search WWH ::

Custom Search