Image Processing Reference
In-Depth Information
More generally, in the context of the coexistence of several sensors, a confidence
level is assigned to each sensor conditionally to each hypothesis of the frame of
discernment [APP 91]. This level is constantly adapted based on contextual knowl-
edge and must reflect the sensor's reliability given the context (temperature, degree of
humidity, partial masking, etc.). This level can be associated with the validity of simul-
taneously using a set of sensors, the reliability of a sensor depending on the context
and not on hypotheses [NIM 98].
The second level consists of extracting the various degrees or probabilities of con-
fidence or reliability, based either on
a priori
information or on attribute measurements
that have already been conducted. The method then relies on the operator's expertise,
on knowledge acquired about the scene and on the occurrence of outside events. In the
end, we need a final action that can be expressed in operational terms, such as resource
management with respect to mission objectives or priority orders.
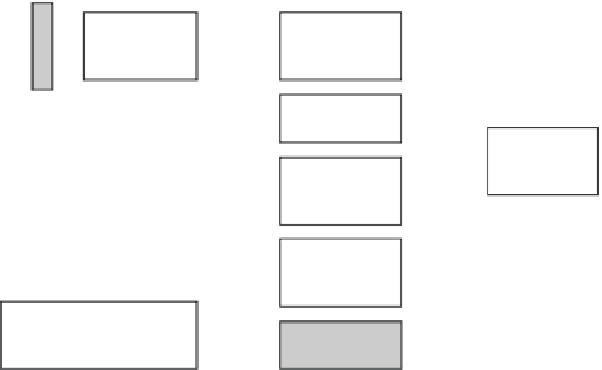
Figure 2.5 shows the three stage supervision of a change in orientation of sensors,
in the case of an absence of data caused by masked terrain.
contextual event: masked terrain, missing data
range
position
orientation
terrain data
calculation of
the masking
risks
calculation of
the coverage
domains
S
S
target
configuration
sensor
orientation
change
detected targets
threat
level
assessment
S
strategic sites
protection instructions
sensor modes
weather forecast
calculation
of sensor
availability
S
system states
final or inter
mediate actions
supervisor
missile guidance,
measurement request,
precision request
transmission
instructions
S
Figure 2.5.
Controlling the orientation of sensors in the case of masked terrain
As a result, this high-level control is strongly related to the problem of synchro-
nizing and integrating data. A geographically distributed system involves a communi-
cations network comprised of slow and fast channels. The transmission time can vary,
meaning that the observation may reach the fusion center in non-chronological order.
































Search WWH ::

Custom Search