Image Processing Reference
In-Depth Information
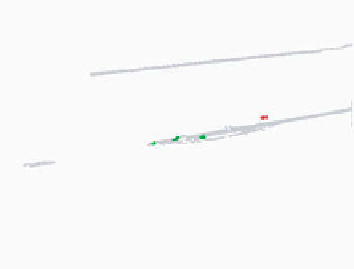
detected vehicle
probabilities of belonging to the vehicle concept:
probability included between 67 and 74%
probability smaller than 63%
Figure 10.16.
Segmentation of vehicles with two focusing strategies. On the left, the initial
image is shown, and on the right, the result of the segmentation. Four vehicles
are detected: three on the road, and one next to the road
the image. The vehicle located next to the road is characterized by a probability of
roughly 60%. This probability is much lower than the other probabilities measured
(in the range of 70%) that characterize the vehicles on the road. This result illustrates
the impact of the focusing relations. The probability of observing a vehicle on a road
remains higher than that of observing a vehicle next to the road.
In this example, we focused on the spatial exploration of the image. For the road
objective, this exploration is represented by the series of localization, detection, then
focusing behaviors, which allows a change of objective and an iteration of the process.
All of the results that we have presented are relevant to intra-image processing. We will
now consider a sequence of images and present, among other things, the concepts of
incrementality and adaptability.
10.6.3.
Indirect analysis: spatial and temporal exploration
In this section, we give an illustration of the different forms of comprehensive
system adaptation. We have chosen to present the results for a sequence of 9 images
shown in Figure 10.17. We have introduced a perturbation (a uniform increase in the
gray levels) in the images numbered one and three in order to better evaluate the
system's adaptive nature.
Using the graphical interface, we have specified the knowledge base presented in
Figure 10.18. This is comprised of two concepts: vehicle and field. The vehicle con-
cept is characterized by three localization methods, a detection method and a method
related to motion detection. The field concept is characterized by three localization
methods, a detection method and a focusing strategy that imposes a constraint on the
search for vehicles in fields.




Search WWH ::

Custom Search