Image Processing Reference
In-Depth Information
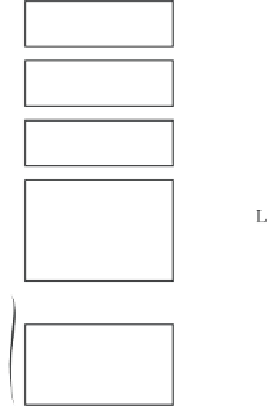
The knowledge base is organized in four parts (an example is shown in Figure
10.6).
{domain}
image : image.gif
goal
concept : ]
{validation}
valid : 0,6
localization behavior
{concept 1}
Name : road
size : 1
hough
gray
behavior
description
area
detection behavior
focusing behavior
Figure 10.6.
The knowledge base
- the first specifies the field of our work, i.e. the set of images used;
- the second defines the initial objective given to the system;
- the third part provides the validation threshold as regards the extracted informa-
tion; this validation threshold will be used in the inter-image control cycles, among
other things, to choose the samples to copy;
- the last part provides a description of the methods necessary to the agents
and their parameters. The different methods consist of localization, detection, focus-
ing and movement, which are characterized by the tags “L”, “D”, “F” and “M”,
respectively. Localization methods rely on local criteria for intensity (“GREY”),
homogenity (“HOMOG”), area (“AREA”) and criteria related to the Hough trans-
form (“HOUGH”). Thus, a sample is defined as a set of points that verifies a set
of criteria associated with the current concept. Detection methods are based on area
growth (“DETEC”). Finally, focusing methods (“FOCUS”) search for new areas of
interest, based on the current information, using three different strategies: on (“O”),
next to (“N”) or elsewhere (“E”) in the image. A movement detection method has been
implemented (“MOVE”) and, based on the optical flow constraint, it is expressed as
an optimization problem [KOR 97].
The elements of information specified in the knowledge base depend on the appli-
cation field and more specifically on the context of the mission. As a result, they are
difficult to specify beforehand. To overcome this difficulty, we have chosen an inter-
active acquisition of knowledge using a graphical interface (developed in TCL/TK)















































Search WWH ::

Custom Search