Image Processing Reference
In-Depth Information
This chapter is organized as follows: in section 10.1, we will describe the appli-
cation and the state of the art in the field, before presenting the fundamental concepts
of the system in section 10.2. In section 10.3, we will present the architecture and the
platform used. In section 10.4, we will describe the agents of the system and the con-
trol scheme we propose. In section 10.5, we will describe the information handled by
the agents. Finally, in the last section, we will illustrate this architecture with different
results that were obtained.
10.1. The DRI function
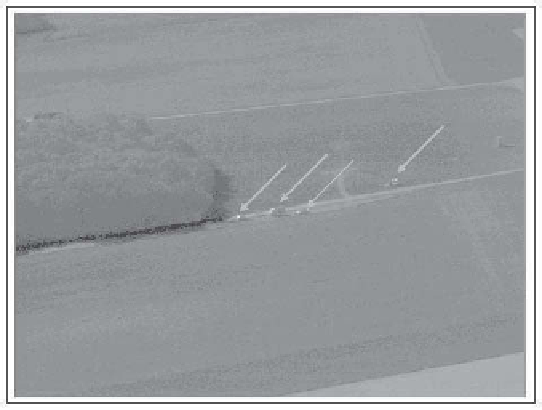
The DRI function is comprised of three phases. Detection consists of finding the
possible threats in the image. In this phase, little information is available: the target is
represented by roughly a dozen pixels. An example is shown in Figure 10.1.
Figure 10.1.
Examples of vehicles in the detection phase.
Each target is indicated by an arrow
In the recognition phase, the mechanism is more precise since it specifies the tar-
get's class. The objective is then to answer the question: “is it a ground vehicle, a
boat or a ship?” Finally, in the identification phase, the system has to be able to name
the target: “is it an AMX10 tank, a frigate or a Mirage 2000 plane?” The consecutive
phases of detection, recognition and identification require for the information regard-
ing the target to be expanded in time.
Search WWH ::

Custom Search