Information Technology Reference
In-Depth Information
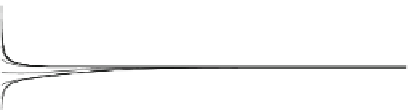
10
5
0
-5
-10
0
0.5
1
1.5
2
2.5
3
Time (s)
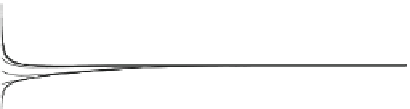
10
5
0
-5
-10
0
0.5
1
1.5
2
2.5
3
Time (s)
Fig. 4.6
Simulation for different initial conditions
Ta r j e t
is determined by the Algorithm 4.5, and
is a positive constant whose value
must be high enough to ensure that the system stability achieved in the adjustment
phase is not affected by this setting the equilibrium state. The proper value of
β
may
vary depending on the system to be designed and the number of points used, although
a value of
β
10
6
β
=
is usually sufficient in most cases.
F
eq
=
(
)
1
+
β
·
f
0
Ta r j e t
(4.51)
4.4 Examples
4.4.1 Illustrative Example
Be the following nonlinear system,
x
1
(
˙
)
=
x
1
(
)
+
2
x
2
(
)
+
u
1
(
)
t
t
t
t
(4.52)
2
x
2
(
x
2
(
˙
t
)
=
x
1
(
t
)
−
t
)
+
u
2
(
t
)
a fuzzy model for this system in the universe of discourse
X
⊆ {
x
|
x
∈
[
−
10
,
10]
}
,
U
⊆ {
u
|
u
∈
[
−
50
,
50]
}
(4.53)




























Search WWH ::

Custom Search