Information Technology Reference
In-Depth Information
Tu(k−2)
Tu(k−1)
1
1
Neg
Zero
Pos
Neg
Zero
Pos
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−10
−5
0
5
10
−10
−5
0
5
10
N·m
N·m
Angle(k−2)
Angle(k−1)
1
1
Neg
Zero
Pos
Neg
Zero
Pos
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−100
−50
0
50
100
−100
−50
0
50
100
Position(º)
Position(º)
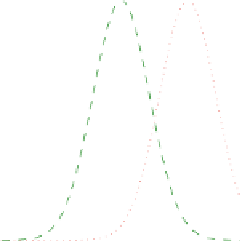
Fig. 3.8
Membership functions for the mechanical system FIS
With 81 rules, after FPCA, we obtain just one rule with
⎛
⎞
−
0
.
00006
⎝
⎠
0
.
00130
g
˜
(
x
)
=
−
0
.
01961
·
ξ(
x
)
(3.47)
0
.
04195
−
0
.
00037
In the Fig.
3.9
not seen hardly any difference between the fuzzy model and fuzzy
simplified. Measurement error between the simplified system and the original, in this
time interval (3332 samples), is
99
.
92
2
dt
10
−
11
e
=
e
(
t
)
=
3
·
(3.48)
0
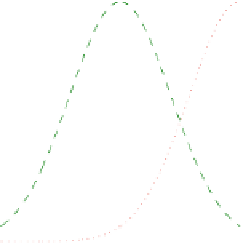
Giving random values to all inputs of the two fuzzy sets, we get the result shown
in Fig.
3.10
. In this case, the error according to equation (
3.48
) is 34.835.




























































































































Search WWH ::

Custom Search