Information Technology Reference
In-Depth Information
(a)
(b)
(c)
(d)
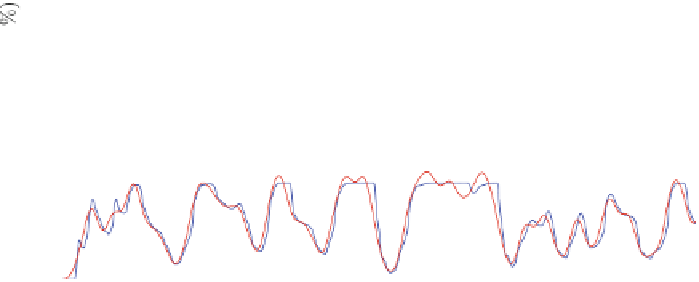
Fig. 14.10
Results of the simulationwith realistic accelerations and decelerations of the pursued car
14.5 Conclusions
A Takagi-Sugeno fuzzy control system has been developed for the throttle and brake
pedals of a car, whose objective is to follow another one which precedes it, while
maintaining a safe distance depending on the speed. The structure of the controller
(number of inputs, number and shape of the membership functions, etc.) was previ-
ously fixed. Then, a genetic algorithm and a mathematical model were used for the
tuning of the parameters in the consequents of the rules, by means of simulation.
The controller thus obtained is able to perform this task in a very successful way, as
demonstrated by the results of the simulations.
Although in this case the consequents of the rules are the only parameters tuned,
any other parameters could be included as genes in the chromosomes, for example
the positions and the widths of the membership functions of the inputs. This would






































































































































































































































Search WWH ::

Custom Search