Information Technology Reference
In-Depth Information
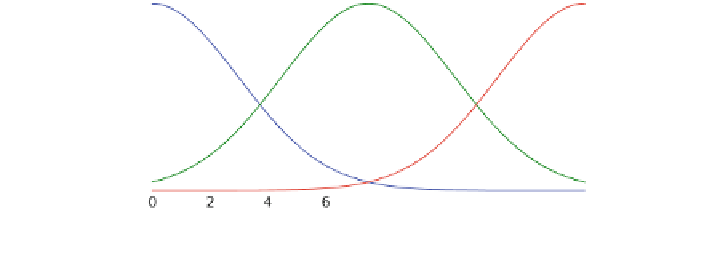
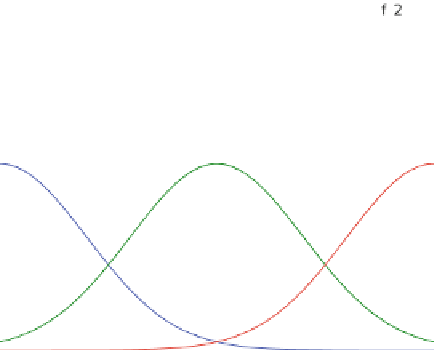
Fig. 14.2
Membership functions for the inputs of the fuzzy controller
14.2.4 Controlled Car
This block models the longitudinal dynamics of the controlled car, which has the
sensory system and the fuzzy control system. It consists of a front wheel drive car
with an automatic gearbox of five gears. Its inputs are the actions on the accelerator
and brake pedals, in the range from 0 to 100, provided by the fuzzy control system.
The wind speed and the incline of the road are also inputs of the model, but in this
work they are set to zero. The block's output is the current speed of the car, which is
integrated to obtain the position, and then fed back to the sensory system, as can be
seen in Fig.
14.1
. A more detailed block diagram of this car is shown in Fig.
14.3
.
14.2.4.1 Body
Figure
14.4
shows a two-wheel model with the relevant forces acting on the body
and its main dimensions:
•
F
xf
,
F
xr
: traction forces provided by the front and rear tyres.
•
F
zf
,
F
zr
: normal reactions to the front and rear axle loads.
•
F
rf
,
F
rr
: rolling resistances of the front and rear tyres.
•
F
a
: aerodynamic drag.






























































































































Search WWH ::

Custom Search