Information Technology Reference
In-Depth Information
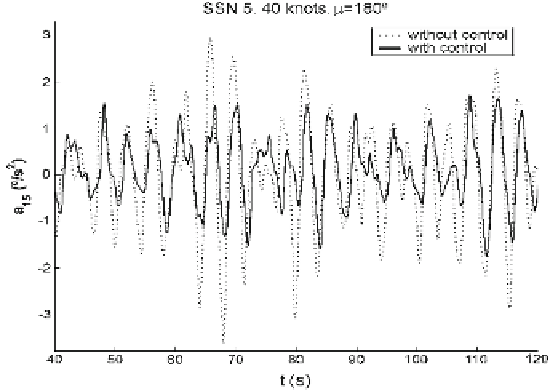
Fig. 10.10
Pitch acceleration (SSN 5, 40 knots, heading sea)
the reduction is 41.09%. The improvement regarding the MSI is 35.55 and 56.14%
respectively.
Figure
10.10
shows the pitch acceleration signal (
◦
/s
2
), that is, WVA, without
control (dashed line) and with this fuzzy control (solid line).
10.5 Conclusions
Marine systems are known to be rather nonlinear with significant poorly understood
influences. So, finding a general model of the system is not a trivial task, and it allows
to try different control alternatives for the crafts. In this chapter, a general neuro-fuzzy
model has been obtained for the TF-120 fast ferry vertical motion. Based on physical
principles, experimental and simulated data, and on the qualitative knowledge of its
behavior, a neuro-fuzzy inference system has been applied to estimate the non-linear
model. The model has been developed for pitch and heave motions and heading seas,
using as inputs the sea state or modal frequency of the waves, the ship speed and the
heading angle. Besides, a predictive model has been also obtained for irregular waves
by again applying adaptive neuro-fuzzy techniques. The neuro-fuzzy models show
good pattern with experimental and simulated data for regular and real waves, for dif-
ferent sea states, and have been compared with other models with satisfactory results.
On the other hand, it has been proved that sea sickness is related, in a cumulative
form, to vertical accelerations. So, intelligent controllers are proposed to stabilize
the vertical motion of the craft and therefore to improve the comfort and safety of
sailing. The fuzzy systems control the working angles of some appendages (transom
flaps and a T-foil near the bow) that have been coupled to the craft.
Search WWH ::

Custom Search