Information Technology Reference
In-Depth Information
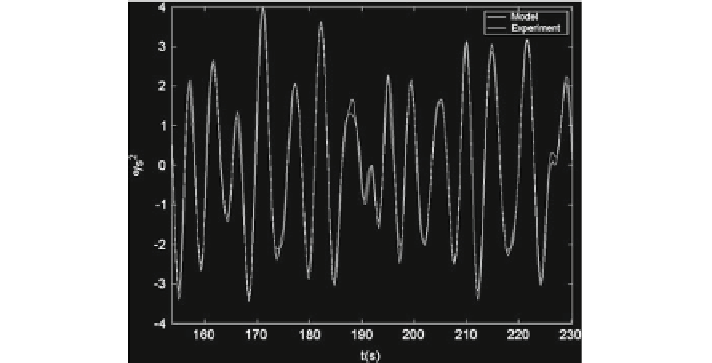
Fig. 10.3
Pitch acceleration, experimental data (
red line
) and model (
blue line
)
assumption. Pitch and heave forces (at constant ship speed, U) depend on the waves
in the
n
(10) previous instants (taken at every
t
were obtained after several calculations. The model is therefore given as a function
t = 1.5 s). These values of
n
and
v
(
t
)
=
f
(
h
(
t
−
n
t
), . . . ,
h
(
t
−
(
n
−
1
)
t
),
h
(
t
−
t
)).
(10.1)
This unknown function is identified by using adaptive neuro-fuzzy inference sys-
tems. The
n
+ 3 inputs (13) of the FIS are the amplitude of the last
n
waves (10), the
modal frequency,
ω
0
, the heading angle,
μ
, and the ship speed, U; the output of the
system is the final heave or pitch force/acceleration. The model has 200 adjustable
parameters and up to 1.182 available data for training (experiments with regular
and irregular waves). This FIS is trained with a third of the data; generalization is
done with the second third, and the testing with the last third. Figure
10.3
shows
the results for the pitch acceleration at 20 knots speed, SSN
=
6 and heading sea
(estimated error
0.12).
As it can be observed, the model follows the results of the experiments and fits
well the real data (Santos et al.
2005a
).
=
10.3 Fuzzy Control of the Vertical Acceleration of Fast Ferries
The main problem of dealing with these fast ferries is to stabilize the motion of the
craft, not only for the comfort of the passengers but also for other purposes, whilst
maintaining the speed. As said before, the main impact on the behavior regarding
this aspect is caused by the vertical motion that originates the seasickness.
Search WWH ::

Custom Search