Information Technology Reference
In-Depth Information
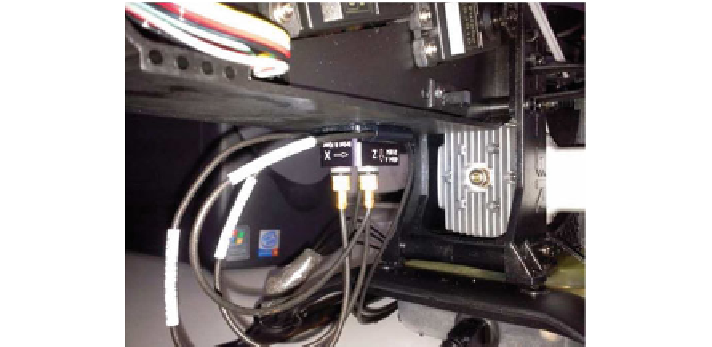
Fig. 9.1
Close-up of the triaxial accelerometer attached to the helicopter and its orientation
mixture of methanol and synthetic oil, the total weight of the helicopter without fuel
is around 2.9 kg. In order to obtain these measurement values, the authors connected
a DeltaTron4504A triaxial piezoelectric accelerometer at the base of the helicopter.
This is a shear-type accelerometer with three independent outputs in a cartesian-axes
way, it is very sensitive, light and with a high resonance frequency. A close-up view
of the mounting assembly is shown in Fig.
9.1
, in which the accelerometer is located
at the same position where the vision system is to be installed.
Figure
9.2
shows the complete experimental setup for collecting the most typical
vibration signals under various flight conditions. As it can be seen, along with the
accelerometers, a signal recorder device and a laptop have been included.
The collected data correspond to the vibration disturbance signals. Because of
that, the semi-active devices should be able to diminish their negative influence on
the vision system. In this sense, a Neuro-Fuzzy strategy has been implemented. The
proposed isolation method consist of a spring-damper system with a time-dependent
damping value C(t). This time dependency allows designing an adaptive control with
the capability of being modified according to the vibration characteristics measured
in the helicopter. A key feature in this control algorithm is the adequate determination
of the damping variable. In this sense, it seems very convenient to use any kind of
intelligent system. Particularly, anAdaptive Neuro-Fuzzy Inference System (ANFIS)
(Jang
1993
) has been used. The process of building anANFISmodel has three phases:
collecting the input/output data set that it will be used by ANFIS for training, the
creation of a Fuzzy Inference System as initial structure (Marichal et al.
2009
) and
finally the application of a learning algorithm. The collected measurements are used
as inputs to the system. In fact, these data provided by the accelerometer should be
analyzed in order to obtain the dominant frequencies of the vibration signal. In other
words, the adaptive control system will analyze the frequencies of the disturbances
produced by the helicopter on each axes and it will decide which C value minimizes
Search WWH ::

Custom Search