Information Technology Reference
In-Depth Information
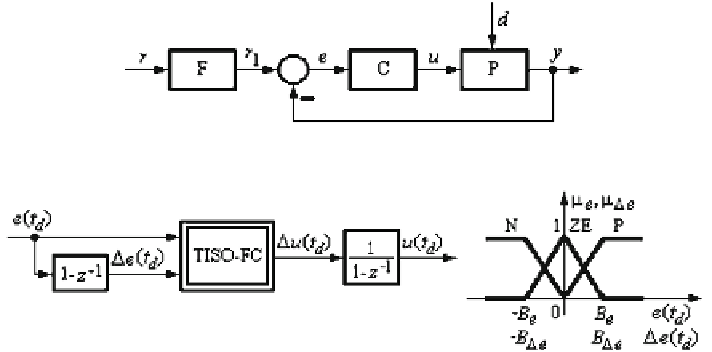
Fig. 8.1
Control system structure
Fig. 8.2
Structure and membership functions of TS PI-FLC
minimization leads to fuzzy controllers with a reduced process parametric sensitivity.
The vector variable
will be omitted in the sequel for simplicity.
The performance specifications can be fulfilled in terms of the control system
structure presented in Fig.
8.1
, where
r
is the reference input,
r
1
is the filtered
reference input, P is the process, F is the reference input filter, and C is the controller.
PI controllers are recommended for these processes (Åström and Hägglund
1995
;
Preitl and Precup
1999
), and the transfer function is
ρ
C
(
s
)
=
k
c
(
1
+
sT
i
)/
s
=
k
C
[
1
+
1
/(
sT
i
)
]
,
k
C
=
k
c
T
i
,
(8.6)
Very good control system performance indices (settling time, overshoot, etc.) and
a trade-off to these indices can be achieved if the PI controllers are tuned by the
Extended Symmetrical Optimum (ESO) method (Preitl and Precup
1999
) that uses a
single design parameter set by the control systems designer. The PI tuning conditions
specific to the ESO method are
T
2
k
c
=
1
/(β
β
k
p
),
T
i
=
β
T
,
1
<β<
20
,
(8.7)
and the following reference input filter ensures the improvement of the performance
indices:
F
(
s
)
=
1
/(
1
+
β
T
s
).
(8.8)
Simple TS PI-FLCs with the structure and input membership functions presented
in Fig.
8.2
are designed and tuned for further performance improvement.
Figure
8.2
points out the increment of control error
e
(
t
d
)
=
e
(
t
d
)
−
e
(
t
d
−
1
)
and the increment of control signal
that also result
from discretizing the continuous-time PI controller. Tustin's method leads to the
incremental form of the discrete-time PI controller and to its parameters
u
(
t
d
)
=
u
(
t
d
)
−
u
(
t
d
−
1
)
Search WWH ::

Custom Search