Information Technology Reference
In-Depth Information
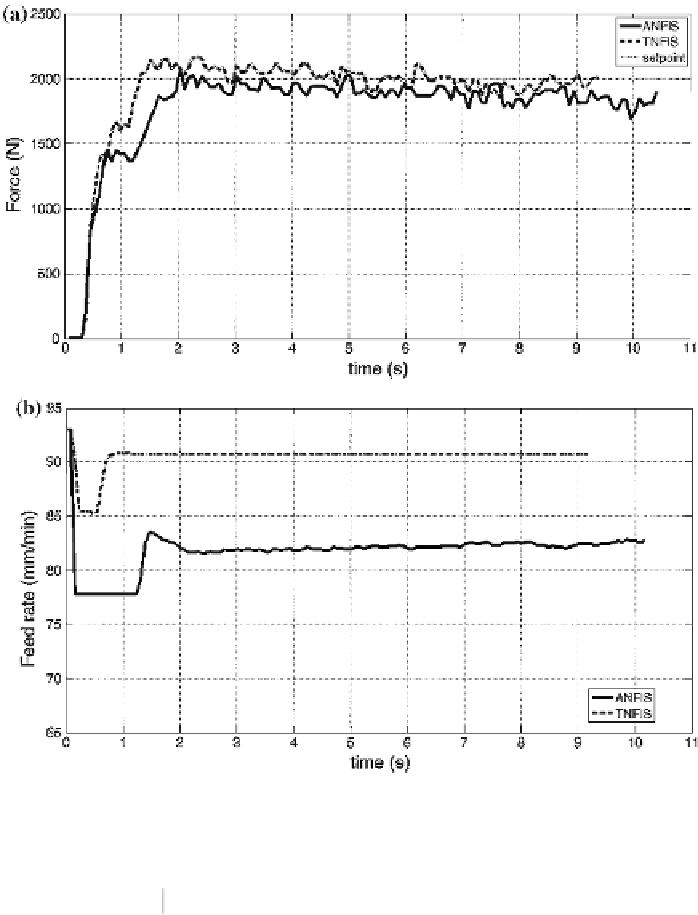
Fig. 7.8
a
Real system response (drilling force) and
b
control signal (feed rate) in operation with
17-4PH
Table 7.2
Performance indices for the force drilling control experiments using 17-4PH material
Controller
ITAE
ITSE
IT2SE
Ovt (%)
ANFIS
3.78
0.45
2.28
3.47
TNFIS
1.42
0.18
0.33
8.21
From the analysis, the reader can figure out how the TNFIS system is capable
of generating local models with satisfactory accuracy and good dynamic behaviour.
Control strategies based on the transductive neuro-fuzzy) paradigm were applied
to drilling force regulation in an industrial environment. A comparative study of














Search WWH ::

Custom Search