Information Technology Reference
In-Depth Information
5
5
q=5.5 r=4.5
est. err. 1%
q=5.5 r=4.5
est. err. 5%
0
0
−5
−5
−10
−5
0
−10
−5
0
5
5
q=5.5 r=4.5
est. err. 20%
q=5.5 r=4.5
est. err. 50%
0
0
−5
−5
−10
−5
0
−10
−5
0
5
5
q=5.5 r=4.5
est. err. 100%
q=5.5 r=4.5
est. err. 80%
0
0
−5
−5
−10
−5
0
−10
−5
0
Real (s)
Real (s)
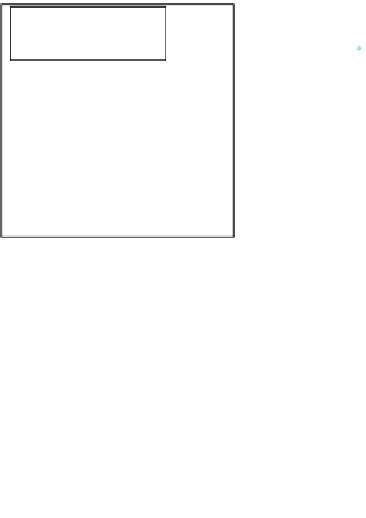
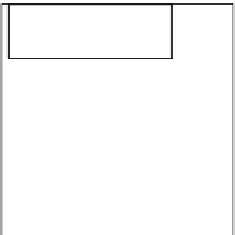
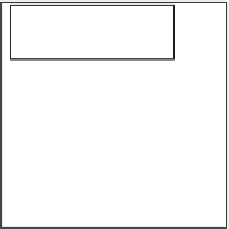
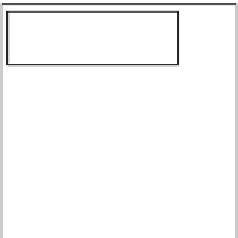
Fig. 6.7
Pole placement of the robot under fault occurrence with active FTC for different possible
uncertainties of the fault estimation (
k
drag
=
5 kg/m)
complex plane, as in the case of an estimation error bigger than 80 % of the real
value of the faulty drag coefficient.
The comparison between passive FTC and active FTC has been carried out for
different regions of the complex plane, all expressed as circles with center
)
and a radius
r
. The obtained results are summarized in Table
6.1
, where the lower
bound on the value of
k
drag
for which fault tolerance is guaranteed, is given for each
circle in both the passive and the active FTC cases. Moreover, for the active FTC case,
(
−
q
,
0









































































































































Search WWH ::

Custom Search