Information Technology Reference
In-Depth Information
8
0.5
6
4
0
2
0
−2
−0.5
0
20
40
60
0
20
40
60
10
0.8
0.6
5
0.4
ref
k
drag
=11
k
drag
=5
k
drag
=1
k
drag
=0
0.2
0
0
−5
−0.2
−0.4
−10
−0.6
−15
−0.8
0
20
40
60
0
20
40
60
time
time
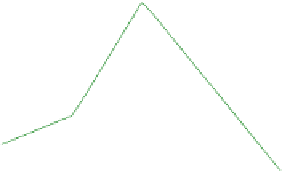
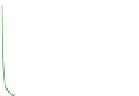
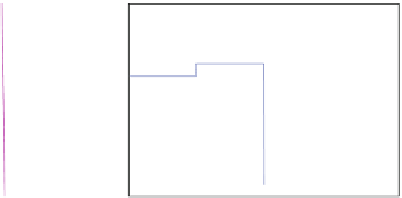
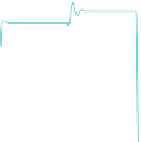
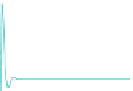
Fig. 6.3
Time response of the robot under fault occurrence
as premise variables,
the approach described in Sun and Postlethwaite (
1998
), Tanaka et al. (
2001
), often
referred to as
bounding box method
, is used for obtaining a Takagi-Sugeno model
described by 8 subsystems as follows:
Using
a
22
(
x
2
,
x
4
)
,
a
24
(
x
2
,
x
4
)
,
a
42
(
x
2
,
x
4
)
and
a
44
(
x
2
,
x
4
)
IF
a
22
(
x
2
,
x
4
)
is
M
i
22
AND
a
24
(
x
2
,
x
4
)
is
M
i
24
AND
a
44
(
x
2
,
x
4
)
is M
i
44
THEN
⎛
⎝
⎞
⎛
⎞
⎛
⎞
⎛
⎞
0100
0
˙
x
1
(
t
)
x
1
(
t
)
00
u
1
(
⎠
=
⎝
⎠
⎝
⎠
+
⎝
⎠
a
24
0001
0
a
22
0
˜
˜
˙
x
2
(
t
)
x
2
(
t
)
1
m
00
−
/
m
1
/
t
)
˙
x
3
(
t
)
x
3
(
t
)
u
2
(
t
)
2
a
24
r
2
˜
2
mr
2
mr
˙
x
4
(
t
)
˜
x
4
(
t
)
0
a
44
(6.31)
where
a
jk
can either be a minimum value
a
jk
or a maximum value
a
jk
, depending on
the subsystem taken in consideration. Accordingly, the membership functions
M
ijk
can have one of the following structures:
˜
a
jk
−
a
jk
a
jk
−
a
jk
M
1
jk
=
or
M
2
jk
=
(6.32)
a
jk
−
a
jk
a
jk
−
a
jk














































































































































Search WWH ::

Custom Search