Information Technology Reference
In-Depth Information
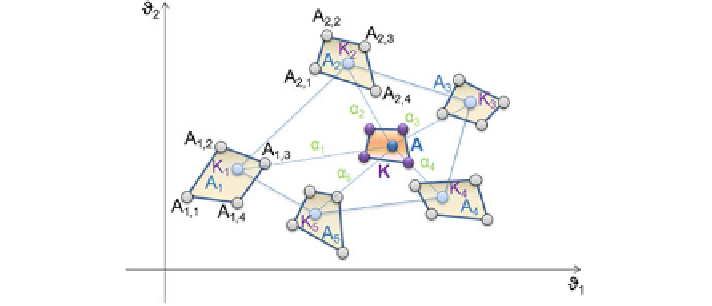
Fig. 6.1
Uncertain Takagi-Sugeno system
A
i
=
A
Ni
+
A
i
(6.6)
B
i
=
B
Ni
+
B
i
(6.7)
where
A
Ni
and
B
Ni
denote the nominal matrices while
B
i
represent the
respective uncertain part, for the
i
th subsystem, that are described in a polytopic way
as follows:
A
i
and
M
A
i
=
1
η
ij
A
ij
(6.8)
j
=
M
B
i
=
1
η
ij
B
ij
(6.9)
j
=
with
j
=
1
η
ij
=
η
ij
≥
1 and
0. Hence, following (
6.2
), the state of the TS system is
inferred as:
N
1
ρ
i
(ϑ(τ))
A
Ni
+
A
i
x
(τ )
+
B
Ni
+
B
i
u
(τ )
σ.
x
(τ )
=
(6.10)
i
=
with
defined as in (
6.4
).
Given an LMI region
ρ
i
(ϑ(τ))
D
= {
z
∈ C :
f
D
(
z
)<
0
}
with the following characteristic
function (Chilali and Gahinet
1996
):
T
f
D
(
z
)
=
α
+
z
β
+¯
z
β
=
[
α
kl
+
β
kl
z
+
β
lk
¯
z
]
1
k
,
l
m
(6.11)
m
is a
matrix, the problem to be solved consists in finding a Takagi-Sugeno state-feedback
controller, as follows:
m
×
m
m
×
where
α
=
[
α
kl
]
∈ R
is a symmetric matrix and
β
=[
β
kl
]∈R
Search WWH ::

Custom Search