Information Technology Reference
In-Depth Information
4
3
2
1
0
−1
−2
Conventiona
l
LDA
Expanded LDA
Largest sphe
r
es
−3
−4
−4
−3
−2
−1
0
1
2
3
4
X
1
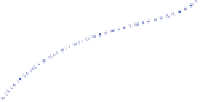
Fig. 5.2
Conventional versus expanded estimate of
D
by using 4th-degree LF. In red, forbidden
zones of
∂
where
g
(
x
)<
0. See Pitarch et al. (
2012
) for further details on its computation
:
V
is an invariant set and only the origin belongs to the set
{
x
(
x
)
=
0
}
. In this way,
the region
by LaSalle invariance principle (Haddad and Chellaboina
2008
). The objective of finding the maximum value for
l
belongs to
D
γ
can be recast as a SOS
problem too (see details in Pitarch et al. (
2012
)).
Example 5.10
Recovering the nonlinear system in Example 5.9, once a Lyapunov
function is obtained, the estimate of
D
can be expanded. The frontier of (
5.46
)is
defined by sets:
R
1
(
)
={
x
1
:−
ρ
≤
x
1
≤
ρ,
x
2
=
ρ
}
,
R
2
(
)
={
x
2
:−
ρ
≤
x
2
≤
ρ,
x
1
=
ρ
}
,
x
x
R
3
(
x
)
={
x
1
:−
ρ
≤
x
1
≤
ρ,
x
2
=−
ρ
}
,
R
4
(
x
)
={
x
2
:−
ρ
≤
x
2
≤
ρ,
x
1
=−
ρ
}
.
As a result of the expansion procedure with the 4th-order Lyapunov function, in
Fig.
5.2
both, the proven expansion of the estimate of
and the numerically-
computed “forbidden” zones of the frontier (in red) are shown. Those are the zones
where system trajectories abandon the square modeling region, so the Lyapunov
equipotential is enlarged until it touches any of those red zones (actually, it is not
done in such a naive way but, as previously mentioned with a suitable SOS opti-
mization setup). As it can be observed, in this case the largest provable spherical
stable region is also enlarged by the expansion procedure,
without
increasing the
complexity of the Lyapunov function.
D












































Search WWH ::

Custom Search