Information Technology Reference
In-Depth Information
4
Proven LDA
Largest spheres
3
2
1
0
−1
−2
−3
−4
−4
−3
−2
−1
0
1
2
3
4
X
1
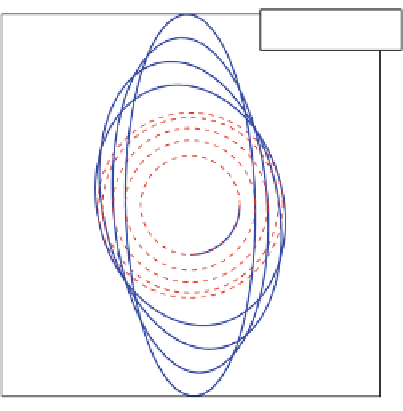
Fig. 5.1
Estimates of
D
with quadratic Lyapunov-functions and different modeling region sizes
5.4.2.1 DA Estimate Expansion
Both, usual techniques in literature such as those presented in previous sections, give
an estimate of
D
defined by the largest Lyapunov equipotential, named for instance
V
(
x
)
=
γ
, which fits in the modeling region
. This is, clearly, a conservative
result because there might be points inside
(but cannot be
characterized in a region defined by a low-degree polynomial boundary).
The above result can be expanded in the same region
which belong to
D
, by using the previously-
obtained Lyapunov function from Theorem5.1 and without increasing the computa-
tional complexity of SOS optimization problems. The basic idea is to take advantage
of the zones from the frontier of
(to be denoted as
∂
) defined by the sets
dg
i
(
x
)
i
:
1
,...,
m
R
i
={
x
∈
∂
:
>
0
,
g
i
(
x
)
=
0
,
g
j
(
x
)
≥
0
}
(5.52)
j
=
i
dt
i.e., edges of the frontier where system trajectories point towards the interior of
.
Therefore, there is no need of forcing
{
x
:
V
(
x
)
≤
γ
}⊂
if
V
(
x
)
≤
γ
crosses the
boundary of
only through points belonging to any set
R
i
. So, for some
γ
such that
{
x
:
V
(
x
)
≤
γ
} ⊂
,the
expanded
region
l
={
x
:
V
(
x
)
≤
γ,
x
∈
}={
x
:
min
(γ
−
V
(
x
),
g
i
(
x
)) >
0
}
(5.53)












































Search WWH ::

Custom Search