Environmental Engineering Reference
In-Depth Information
0
−20
−30
−50
−40
−50
−100
−60
−70
−150
−80
10
−2
10
0
10
2
10
−3
10
−2
10
−1
10
0
10
1
10
2
Frequency (r/s)
Frequency (r/s)
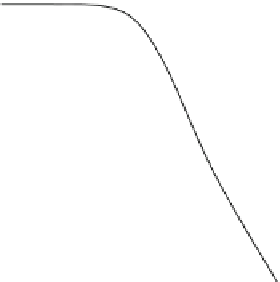
Fig. 4.10 Left frequency response of G(s) corresponding to several operating points in region 3.
Right weighting function W
D
of the additive uncertainty representation Eq.
4.10
e
W
e
(
s
)
z
˜
β
r
W
u
(
s
)
ˆ
w
≡
Ω
N
e
Ω
g
K
M
(
s
)
(
s
)
G
(
s
)
−
y
u
≡
β
r
Fig. 4.11 Controller design setup augmented with weighting functions
The speed regulation results in the minimization of the low frequency com-
ponents of the speed error e
¼
W
e
ð
s
Þð
X
N
X
g
Þ
, where
W
e
ð
s
Þ¼
M
ð
s
Þ
W
e
ð
s
Þ
ð
4
:
12
Þ
with W
e
a stable transfer function. If M includes integral action, the weight W
e
can
be a simple constant, such as,
M
ð
s
Þ¼
1
=
s
;
W
e
¼
k
e
:
The integral action ensures a zero steady-state error and penalizes the rotational
speed error in low frequencies. Tracking error in high frequencies is not recom-
mended because it would expose the wind turbine to excessive mechanical loads.
The factorization in Eq.
4.12
is necessary for satisfying stabilizability conditions
[
10
]. The controller actually applied to the wind turbine is