Environmental Engineering Reference
In-Depth Information
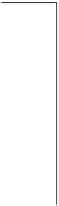
Drive train
Damping
LUT
V
β
T
g
Wind
Turbine
Ω
g
Ω
N
e
β
r
Pitch
Controller
×
−
+
−
k
−
1
gs
LPF
Fig. 4.6 Control scheme covering the entire operating range
rotational speed can be regulated with a linear time-invariant (LTI) controller.
That is, an LTI controller designed for a given operating point can be used for the
whole operating locus. To deal with the parameter uncertainty, H
?
optimal control
tools will be used.
To implement this control strategy, it is necessary to invert k
b
, which is
parameterized by wind speed. Recall, however, that wind speed in not measurable.
To overcome this problem, the one-to-one correspondence between wind speed and
pitch angle that exists in region 3 of the operating locus of Fig.
4.5
can be exploited.
In fact, this one-to-one correspondence means that b suffices to uniquely determine
the operating point in this region. Particularly, it means that k
b
can be parameterized
just in terms of b. This allows computing k
b
as function of a measurable variable.
To simplify this computation, the coefficient k
b
can be approximated by
k
b
ð
b
Þ¼
k
b0
k
gs
ð
b
Þ
The gain k
b0
is k
b
evaluated at operating point where the LTI controller is
designed, whereas k
gs
ðÞ
is a second order polynomial of the form
k
gs
ð
b
Þ¼
c
2
b
2
þ
c
1
b
þ
c
0
computed by curve fitting. The values of k
b
=
k
b0
and the approximation k
gs
for the
5 MW NREL wind turbine can be seen in Fig.
4.8
. To avoid loop interactions, the
scheduling parameter b is obtained by passing the pitch angle through a low pass
filter (LPF).
Before describing the control design, a brief review of H
?
optimal control
concepts is provided in the next section.