Environmental Engineering Reference
In-Depth Information
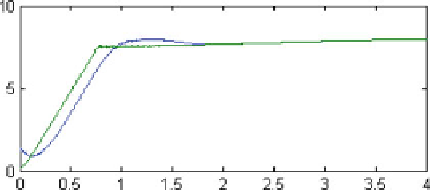
Time (sec)
Fig. 2.17
Rotor speed: Observer (blue) and real (green)
the sensorless control strategy does not induce mechanical stress as there is no
chattering in the wind turbine torque (Fig.
2.19
).
2.4.5 HOSM Control FRT Performances
This subsection deals with the fault ride-through capability assessment of a DFIG-
based WT using a HOSM control. Indeed, it has been recently suggested that sliding
mode control is a solution of choice to the fault ride-through problem [
22
,
23
].
LVRT capability is considered to be the biggest challenge in wind turbines
design and manufacturing technology. LVRT requires wind turbines to remain
Time (sec)
Fig. 2.18
Current I
rd
tracking performance: Reference (green) and real (blue)
Fig. 2.19 Torque tracking
performance: Reference
(green) and real (blue)
Time (sec)