Environmental Engineering Reference
In-Depth Information
Time (sec)
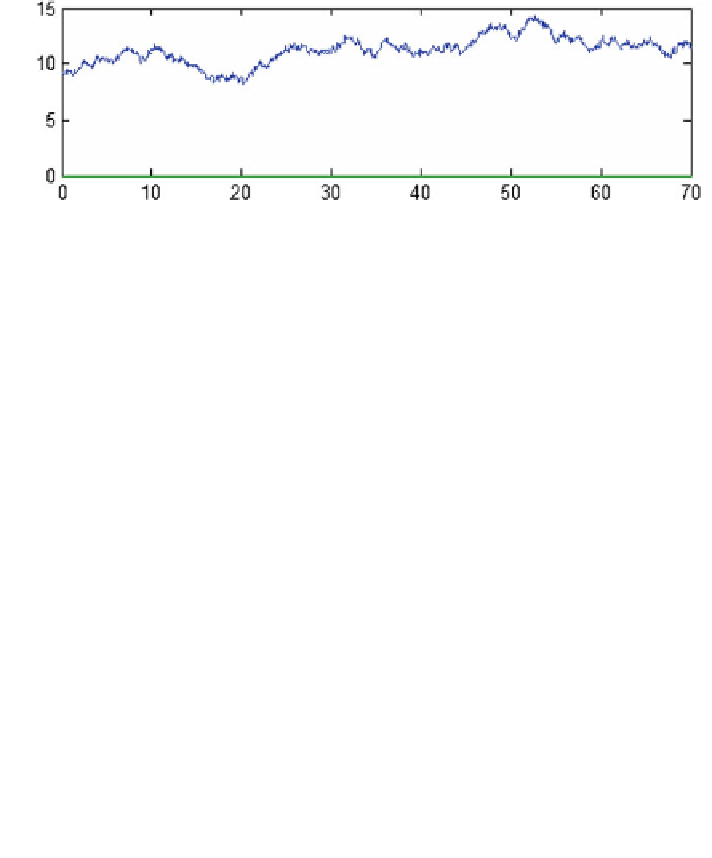
Fig. 2.11
Wind speed profile
Time (sec)
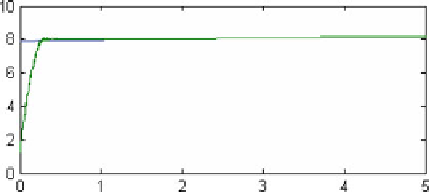
Fig. 2.12
Current I
rd
tracking performance: Reference (blue) and real (green)
Fig. 2.13 Torque tracking
performance: Reference
(blue) and real (green)
Time (sec)
2.4.3 HOSM Control Performances with High-Gain
Observer
The observer validation is clearly illustrated by Fig.
2.14
.
Indeed, the aerodynamic torque tracks efficiently the optimal torque. As shown
in Figs.
2.15
and
2.16
, very good tracking performances are achieved in terms of
DFIG rotor current and WT torque with respect to wind fluctuations. The control
strategy does not induce increased mechanical stress as again there are no strong
torque variations.