Environmental Engineering Reference
In-Depth Information
25
25
20
20
15
15
10
10
K
=1.5e5
Baseline
K
=1.5e5
Baseline
5
5
α
α
0
0
0
200
400
600
0
200
400
600
time (s)
time (s)
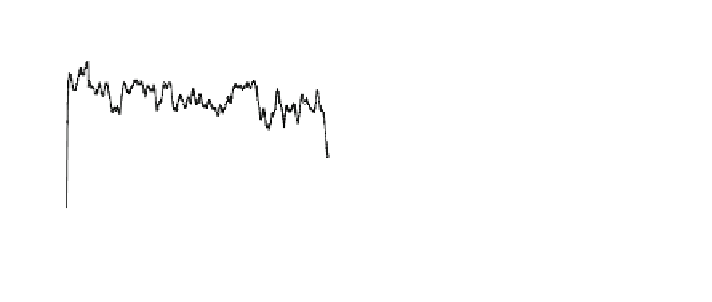
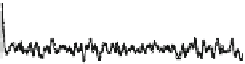
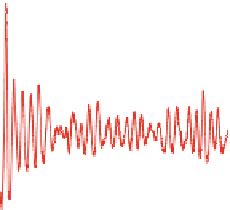
Fig. 15.6
First (healthy) pitch angle (left) and third (faulty) pitch angle (right) for the faulty case
5200
45
5000
4800
40
4600
35
4400
K
α
=1.5e5
Baseline
K
=1.5e5
Baseline
α
4200
0
200
400
600
0
200
400
600
time (s)
time (s)
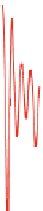
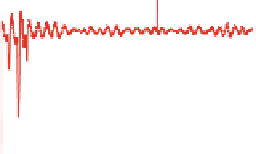
Fig. 15.7
Power output (left) and torque control (right) for the faulty case
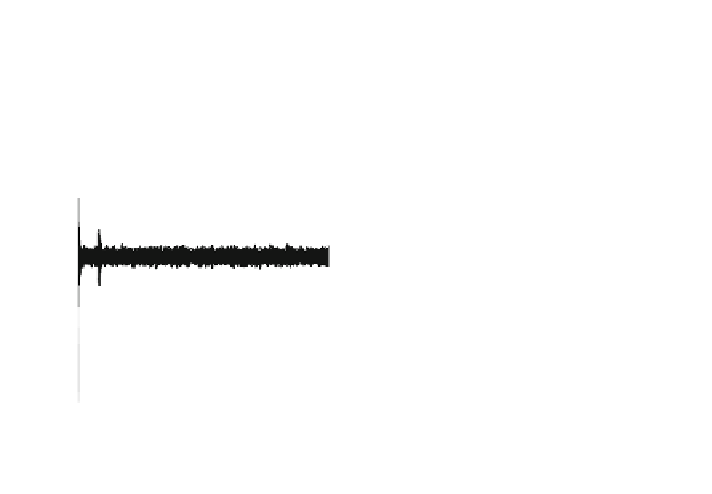
Fig. 15.8 Generator speed
for the faulty case
1800
1600
1400
1200
K
=1.5e5
Baseline
1000
α
800
0
200
400
600
time (s)
• The torque action for the baseline controller achieves the saturation limit
(47.40 kN
m) whereas the proposed chattering controller does not, as shown in
Fig.
15.7
(right). When achieving the saturation limit vibrations and limit
cycles can appear, see [
16
].
• The generator speed for the baseline controller has larger oscillations, as shown
in Fig.
15.8
.