Environmental Engineering Reference
In-Depth Information
P
g
Wind
ε
T
2
nd
Order Sliding
Mode Controller
T
g
ω
r
Wind Turbine
T
^
_
High Gain Observer
+
T
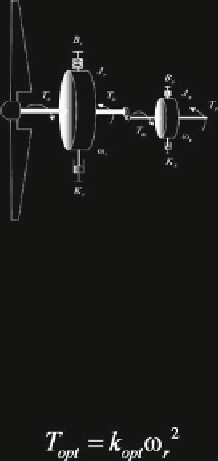
opt
Fig. 2.6
High gain observer principle
Fig. 2.7 Stator S
a
_S
b
, rotor
R
a
_R
b
, and d - q reference
frames
q
-axis
R
β
S
β
d
-axis
ω
s
R
α
θ
s
ω
θ
r
S
α
θ
/
sd
¼
/
s
/
sq
¼
0
ð
2
:
34
Þ
then, the d - q rotor current can be estimated as