Environmental Engineering Reference
In-Depth Information
(a)
(b)
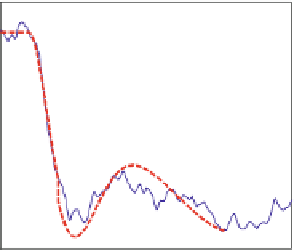
6-blade rotor WT. Experimental data (-), and estimation (- -)
6
-blade rotor WT. Experimental data (-), and estimation (- -)
320
425
420
Wind Speed = 4.22 m/s
315
Wind Speed = 3.68 m/s
415
310
410
305
405
300
400
295
395
290
390
285
385
27 29
31 33
35 37
39 41
43 45
47 49
51 53
55
57
27 29
31 33
35 37
39 41
43 45
47 49
51 53
55
57
Time (sec)
Time (sec)
(c)
(d)
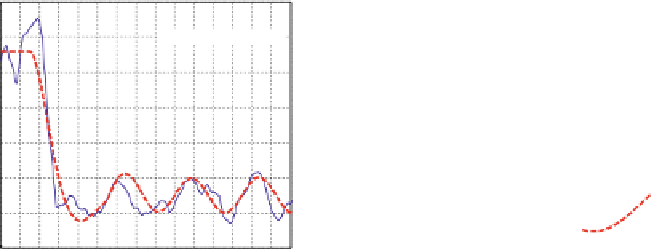
6-blade rotor WT. Experimental data (-), and estimation (- -)
Pitch angle: experimental data (o), and estimation ( - - )
490
5
485
Wind Speed = 4.75 m/s
480
4
475
3
470
465
2
460
1
455
Wind Speed = 0
450
0
445
27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57
14.5
15
15.5
16
16.5
17
Time (sec)
Time (sec)
Fig. 14.15 System identification: (a-c) rotor-speed versus pitch-angle P
1
(s) = X
rs
(s)/b(s); and
(d) pitch-angle versus the actuator input A
b
(s)r
tg
= b(s)/b
di
(s). Sensor signals (solid lines) and
estimated signals using Eqs. (
14.34
) and (
14.35
)(dashed lines). Sampling rate is 2.5 Hz
T
g
is measured using the current sensor (Sect.
14.2.1.4
), and is given in Nm. Using
the signals obtained in these experiments and applying classical system identifi-
cation techniques, the structure, parameters and uncertainty of the transfer function
is found as shown in Eq. (
14.37a
). Figure
14.24
a shows the applied input T
g
in
mN.m and Fig.
14.24
b the experimental rotor speed X
rs
and the estimated rotor
speed with the model in Eq. (14.37), both in rpm.
¼
X
rs
ð
s
Þ
T
g
ð
s
Þ
¼
Q
ð
s
Þ
1
c
2
k
wt
1
c
2
ð
14
:
37a
Þ
2
þ
2 f
wt
s
s
x
nwt
x
nwt
þ
1
where: k
wt
¼
7165
;
x
nwt
¼
10
:
1256 rad
=
s
;
f
wt
¼
0
:
7, and where X
rs
is in rpm
and T
g
in Nm.
The complete plant F
3
(s) in Fig.
14.14
and expressions (
14.27
) and (
14.30
) are
(metric system):