Environmental Engineering Reference
In-Depth Information
γ
r
b
F
T
r
b
Rotor converter
m
b
r
p
Low-speed shaft
High-speed
shaft
I
w
I
x
θ
B
l
θ
K
b
B
b
r
l
T
l
T
r
B
h
T
g
P,Q
m
h
K
l
T
h
R
t
Transformer
θ
θ
K
h
g
I
g
Generator
h
ψ
V
y
t
Gearbox
Wind
m
n
Nacelle
I
r
Rotor
ψ
Grid
β
Wind direction
Pitch
actuator
h
m
t
Tower
K
t
B
t
α
Yaw
actuator
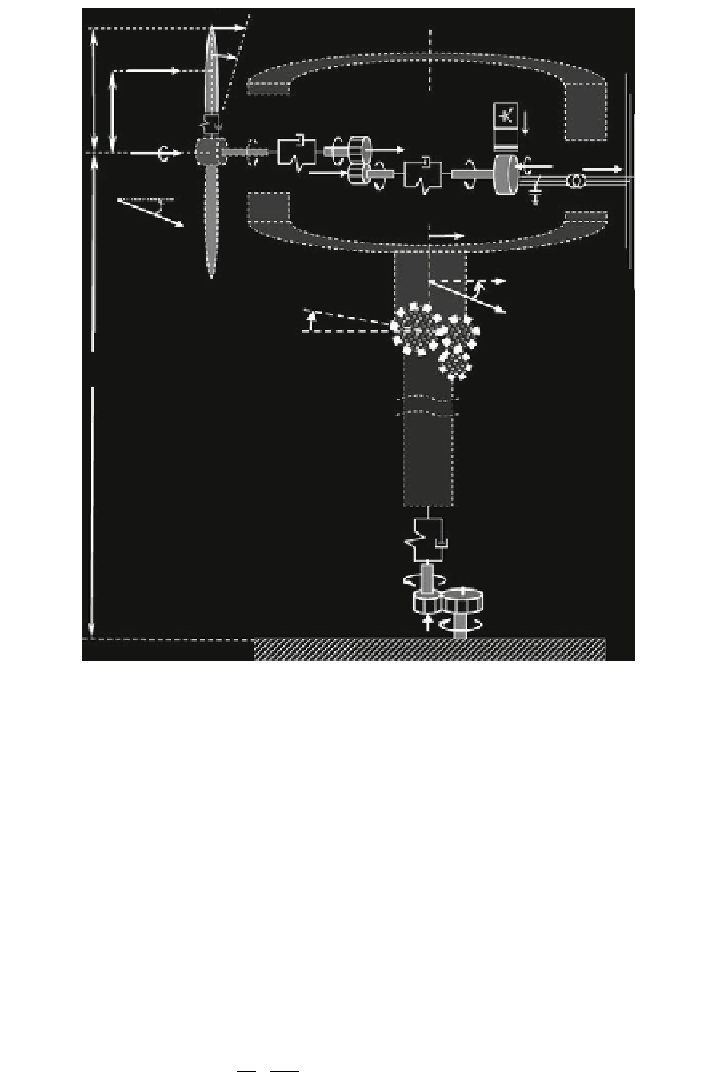
Fig. 14.12 A variable-speed pitch-controlled wind turbine (see [
2
])
The Euler-Lagrange method (energy-based approach) is applied to obtain
general mechanical state space model of wind turbine. The main parameters of the
wind turbine model are described in Table
14.1
(see [
2
] for more details).
The wind turbine dynamic equations of motion that describe the behavior of the
system, under the influence of external forces (wind), and as a function of time, are
developed as a set of mechanical differential equations. The equations of motion in
Lagrangian mechanics are the Lagrange equations of the second kind, also known
as the Euler-Lagrange equations. Note that E
k
is used for kinetic energy and E
p
for potential energy. D
n
is the dissipation function to include non-conservative
forces, Q
i
the conservative generalized forces and q
i
for the generalized coordi-
nates. Defining L as the Lagrangian function L = E
k
- E
p
, the Euler-Lagrange
equation is as follows:
o
L
oq
i
d
dt
oL
o q
i
þ
o
D
n
o q
i
¼
Q
i
ð
14
:
11
Þ