Environmental Engineering Reference
In-Depth Information
4
2.5
3
2
3
2
1.5
2
1
1
1
0.5
0
0
0
EC1 EC2 EC3 EC4 EC5
EC1 EC2 EC3 EC4 EC5
EC1 EC2 EC3 EC4 EC5
3
3
2
2
1
1
0
0
EC1 EC2 EC3 EC4 EC5
EC1 EC2 EC3 EC4 EC5
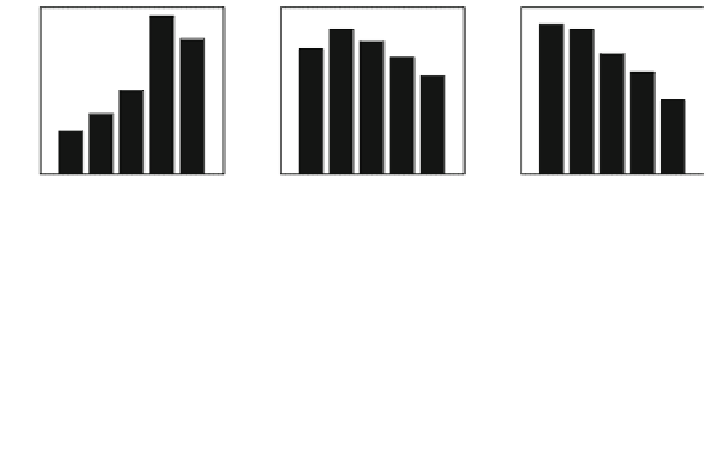
Fig. 11.18
Fault: actuator runaway. Normalized DEL (NDEL) of tower and LSS moments
1.5
3
6
1
2
4
0.5
1
2
0
0
0
EC1 EC2 EC3 EC4 EC5
EC1 EC2 EC3 EC4 EC5
EC1 EC2 EC3 EC4 EC5
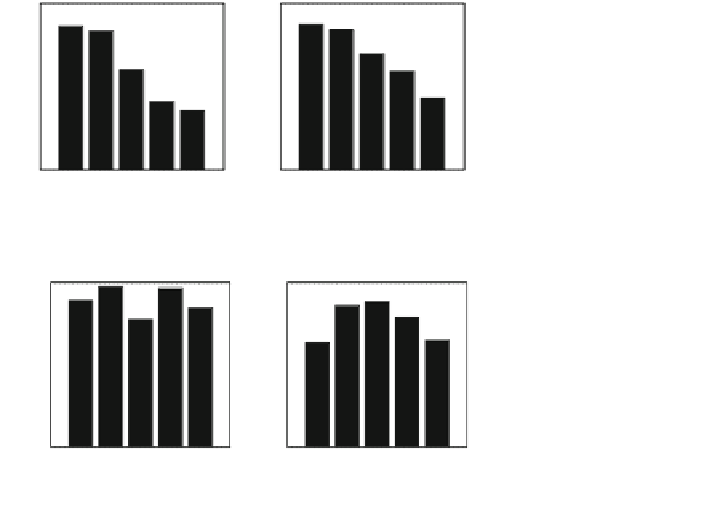
Fig. 11.19
Fault: actuator runaway. Normalized RMS (NRMS) of platform motion
EC5 is considerably lower than rated, the rate of the imbalance-induced moment
will be lower, giving the platform yaw motion the time to respond to such exci-
tation moment. The effect disappears at lower wind speeds (e.g., EC1) where the
rotor speed is almost zero, and the moment built up due to the imbalanced aero-
dynamic loading is considerably less than at higher mean wind speed; at lower
mean wind speeds, the imbalance moment is mostly dominated by the turbulent
wind loading that has higher change rate so the platform yaw motion is not able to
follow these changes which result in an increased tower torsional moment loading
(Figs.
11.18
and
11.19
).
As the rotor speed decreases the turbine loses the thrust force over the rotor
disk, and the restoring moment due to buoyancy forces the turbine to pitch back to
the vertical position. As the generator torque control algorithm uses the collective
blade pitch angle to switch between the operating regions, this algorithm will
always see the turbine to be operating at the full load region, even though the rotor