Environmental Engineering Reference
In-Depth Information
80
60
40
20
0
−20
Pitch system model
Wind turbine model
Wind turbine + pitch system model
−40
10
−2
10
−1
10
0
10
1
10
2
Frequency [Hz]
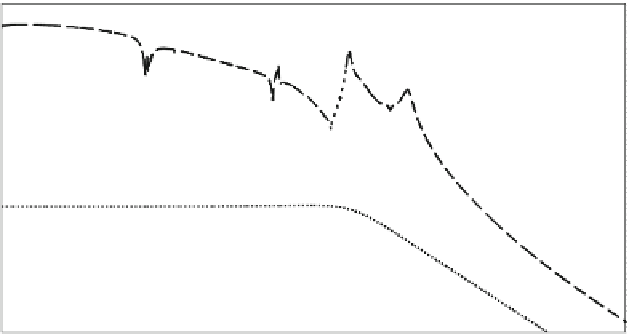
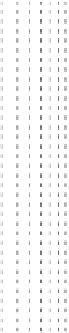
Fig. 11.7 Bode magnitude plot of the transfer function between the collective pitch angle and
the generator speed for wind turbine model with (continuous) and without (dashed) actuator
model. Actuator model (dotted) is considered as second-order model of natural frequency x
n
¼
11
:
11 rad/s and damping ratio f
¼
0
:
6
drive-train torsional mode in addition to platform translational and rotational
DOFs) at a chosen operating point in the middle of the full load region, e.g., the
wind speed at the operating region is 18 m/s and the rotor speed is 12.1 rpm. A
hydraulic pitch system is considered by a second-order model that has the natural
frequency at x
n
¼
11
:
11 rad/s and damping ratio f
¼
0
:
6 (see Table
11.5
). It is
clear that adding the pitch system model to the turbine model does not affect the
dynamics of the system below 2 Hz. For this reason, the GSPI gains are not
affected.
11.3 Faults
An undesired change in the characteristics of a component is normally called a
fault. Faults in general could be categorized according to their temporal profile as
incipient or abrupt. Incipient faults are slow to happen and progress slowly with
time and system dynamics are gradually changed, on the contrary, abrupt faults are
sudden and unexpected. Abrupt faults are generally more easier to detect than the
incipient faults; however, they might have severe consequences on the system.
Faults on wind turbines have different degrees of severity and accommodation.
Once faults are detected, a safe and fast shutdown of the turbine might be nec-
essary in response to some of them, while the turbine could be reconfigured to
continue power production in response to other faults.