Environmental Engineering Reference
In-Depth Information
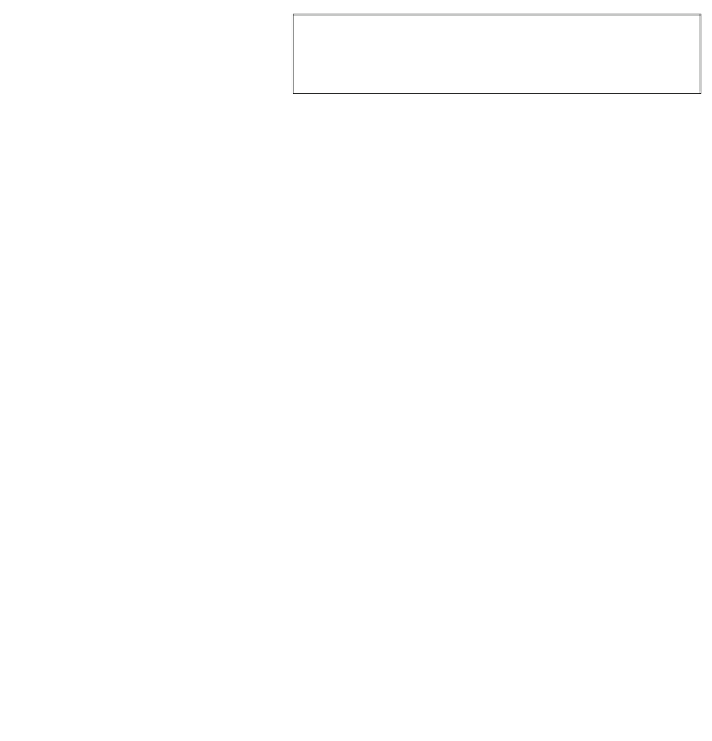
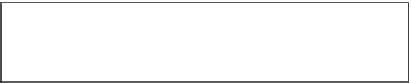
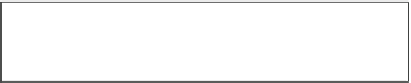
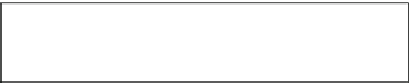
Fig. 10.10 Decision
functions a for stator voltages
b for stator currents
(a)
1
0
0
2
4
6
8
10
1
0
0
2
4
6
8
10
1
0
0
2
4
6
8
10
time [s]
(b)
1
0
0
2
4
6
8
10
1
0
0
2
4
6
8
10
1
0
0
2
4
6
8
10
time [s]
of the other stator current measurements, nor in the rotor current measurements.
On the contrary, Fig.
10.11
b shows that upon occurrence of an additive fault on
the sensor measuring i
r
;
b
(
' ¼
8), the fault is propagated, due to the control
algorithm to the other two rotor currents, and it affects the mean of all three rotor
currents. Finally, the stator currents are also affected by the fault in sensor
' ¼
8.
Oscillations with frequency equal to the rotor current frequency (x
r
¼
x
s
n
p
X
g
[rad/s]) appear, but the means of the stator currents remain unchanged.
Because of these observations, the approach described in Sect. 10.6.2 cannot be
applied to perform sensor FDI in the rotor currents. A method based on a model
of the DFIG, as described in [
14
,
15
], is needed in this case. Nevertheless, using
such a model will imply being sensitive to variations in the electrical parameters
(mainly as function of the temperature) due to the large variation in the operating
conditions. A proper handling of this issue is proposed in the indicated references.