Environmental Engineering Reference
In-Depth Information
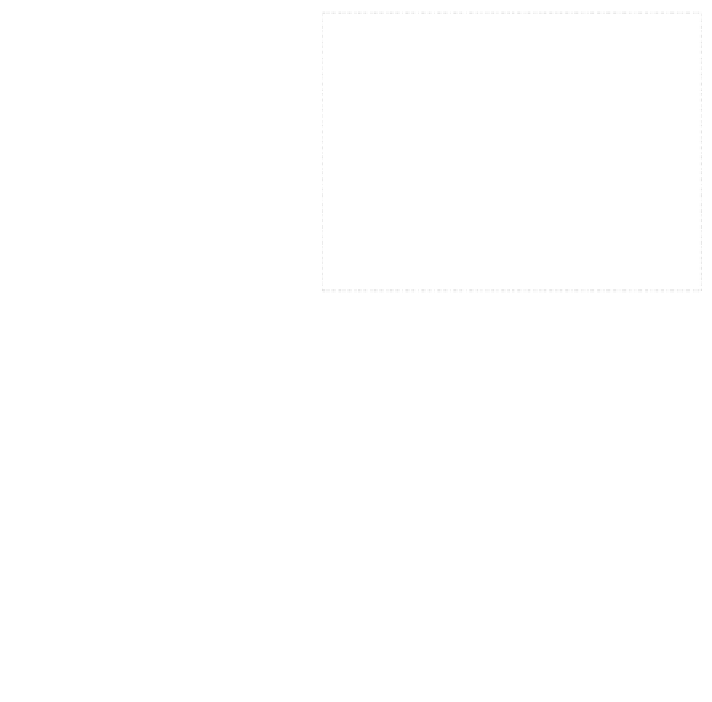
Fig. 10.7 a Imposed slip.
b Faulty sensor
(a)
0.3
0.2
0.1
0
−0.1
−0.2
−0.3
−0.4
0
2
4
6
8
10
time [s]
(b)
9
f
i
r,b
=
5%
8
7
f
i
s,c
=5
%
6
5
4
3
2
f
u
s,a
=
2%
1
0
0
2
4
6
8
10
time [s]
10.5.3.4 Results and Discussion
The outputs of the two GOS are depicted in Fig.
10.9
a for the stator voltages
(
' 2f
1
;
2
;
3
g
) and in Fig.
10.9
b for the stator currents (
' 2f
4
;
5
;
6
g
). In
Fig.
10.9
a, the fault in sensor 1 (u
s
;
a
) between t = 4 s and t = 5 s produces a
change in the mean in components r
2
;
1
and r
3
;
1
, which is consistent with the
incidence Table
10.4
. In Fig.
10.9
b, the mean of components r
4
;
2
and r
5
;
2
presents
a sustained change only between t
¼
8
:
5 s and t
¼
9
:
5 s, which corresponds to the
fault in sensor 6 (i
s
;
c
). All the residuals r
'
for
' 2f
4
;
5
;
6
g
are affected by the other
sensor faults because of their propagation due to the control algorithm, but their
means remain close to zero. The same behavior occurs in the presence of changes
in the references and in the disturbance.
The decision functions resulting from treating the resulting 12-dimensional
residual
vector
r
ð
k
Þ
using
the
multi-CUSUM
algorithm
are
presented
in