Environmental Engineering Reference
In-Depth Information
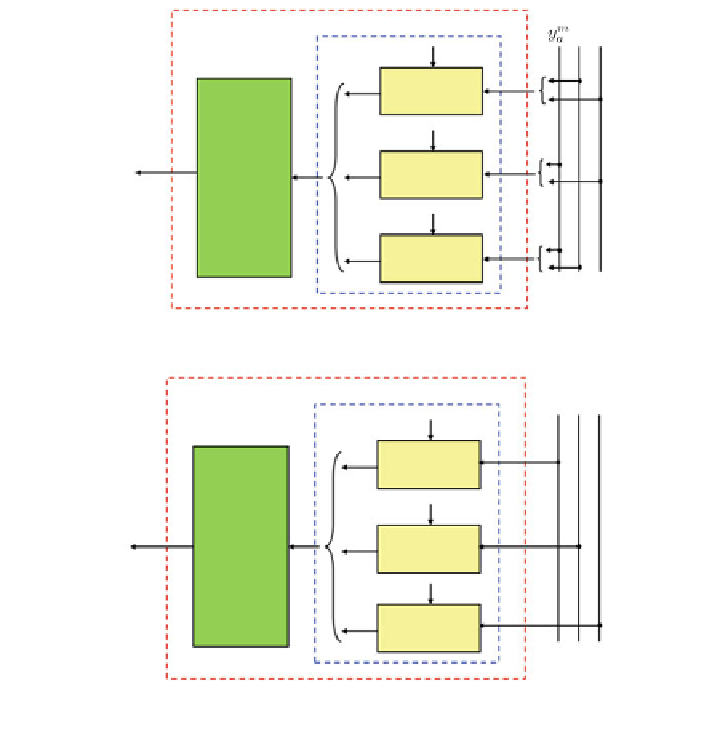
(a)
(b)
Fig. 10.4
Sensor FDI system with residual generation based on the a GOS, b DOS
r
i
ð
k
Þ¼
y
i
ð
k
Þ
y
i
ð
k
Þ
ð
10
:
42
Þ
As it is not easy to distinguish the effect of w
ð
k
Þ
and v
i
ð
k
Þ
on the measured
signals, the covariance matrices R
w
and R
v
i
are used as tuning parameters. They
are selected in order to adjust the residual transient response and its sensitivity to
faults. Specifically, the i-th KF gain K
i
ð
k
Þ
is designed so that the effect of a single
fault on the residuals produced by the GOS (DOS) corresponds to the the incidence
Table
10.2
(3). In these tables, a '1' in row i and column j indicates that residual r
i
changes significatively upon occurrence of fault f
j
, whereas a '0' means that the
residual presents very low sensitivity to fault f
j
, for j
2f
1
;
2
;
3
g
.
Per three-phase signals (currents or voltages), three residual vectors r
i
,
i
2f
1
;
2
;
3
g
, are obtained. By stacking the three residual vectors, we can define
vector r
ð
k
Þ¼½
r
1
ð
k
Þ
T
;
r
2
ð
k
Þ
T
;
r
3
ð
k
Þ
T
T
, which can be processed by a decision