Environmental Engineering Reference
In-Depth Information
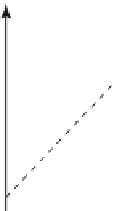
Fig. 1.10 VSC active and
reactive power operating
limits
P
(pu)
P
max
P
j
S
j
max
Q
(pu)
_
Q
max
+Q
max
_
Q
j
max
+Q
j
max
Absorb reactive power
Supply reactive power
When controlling WT, it is important that the operating limit of WT is not
exceeded. The reactive power required from an individual grid-side converter of
the VSC can be computed as
n
o
Q
max
j
Q
set
j
¼
min Q
max
j
ð
1
:
15
Þ
;
DQ
pcc
Q
max
1
þþ
Q
max
5
where j
¼
1
; ;
5
;
Q
ma
j
is the maximum reactive power (limit) that the jth grid-
side converter can provide, and DQ
pcc
is the total reactive power required to
support the voltage at the PCC.
Figure
1.10
shows the active- and the reactive-power operating limits, wherein
it is assumed that the grid-side converter should not exceed its apparent power
limit S
ma
j
depicted by the half-circle. Suppose that at a given time each grid-side
converter is delivering the active power denoted herein by P
j
. Then, in addition to
the active power, the converter can supply or absorb a maximum of Q
ma
j
of the
reactive power. Therefore, the reactive power available from the grid-side con-
verter lies within the limits
Q
max
j
, which are operating-condition
;
þ
Q
max
j
dependent.
Thus, the maximum available reactive power from the each grid-side converter
can be expressed as
r
S
max
j
2
P
j
Q
max
j
¼
ð
1
:
16
Þ
where it is assumed that the nominal apparent power of the each converter is S
max
j
,
defined
here
as
the
WT
rating.
Based
on
Fig.
1.10
,
it
also
follows
that
S
max
j
P
j
S
max
of Q
set
j
.
Thus,
the
maximum
reactive
power
set-point
(see
j
Fig.
1.4
) can be determined by Eqs.
1.15
-
1.16
.
Finally, a PI controller is designed for a controller shown in Fig.
1.9
.ThePI
gains are summarized in the Appendix. Since limiting control action should be
implemented together with the integrator-anti-windup scheme that would stop
integrating the error when the limit is being reached, a PI controller with the