Environmental Engineering Reference
In-Depth Information
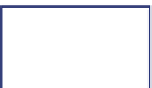
FTC
PFTC
AFTC
Robust
control
Adaptive
control
Estimation &
compensation
Control
reconfiguration
On-line
controller
redesign
Projection
approach
Fig. 7.3
General classification of FTC methods
blade pitch angle b and the wind speed v. The aerodynamic power captured by the
rotor is given by:
P
cap
¼
1
2
qpR
2
C
p
k
;
ð
v
3
ð
7
:
1
Þ
where q is the air density, R is the rotor radius, and C
p
is the power coefficient that
depends on the blade pitch angle (b) and the tip-speed-ratio (k) (TSR) defined as:
k
¼
x
r
R
v
ð
7
:
2
Þ
The aerodynamic torque is thus:
T
a
¼
1
2
qpR
3
C
q
k
;
ð
v
2
ð
7
:
3
Þ
where C
q
¼
C
k
is the torque coefficient.
The drive train is responsible for gearing up the rotor rotational speed to a
higher generator rotational speed. The drive train model includes low and high
speed shafts linked together by a gearbox modelled as a gear ratio. The state space
model of the wind turbine drive train has the form: