Environmental Engineering Reference
In-Depth Information
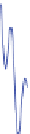
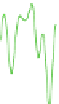
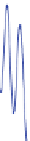
Fig. 6.9 Platform pitch
angle
5
Constrained controller
Baseline controller
4
3
2
1
0
−1
−2
−3
−4
350
400
450
500
550
[Time]
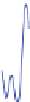
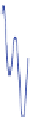
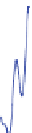
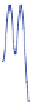
Fig. 6.10 Blade pitch angle
23
Blade 2
Blade 2
Blade 3
22
21
20
19
18
17
16
15
14
13
12
350
400
450
500
550
[Time]
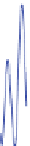
satisfactory manner and the overall system is stable, even if blade 3 is not moving.
The behavior of the system is not as steady as in the references [
3
-
6
], but the main
advantage with the approach proposed in this chapter is that the system is much
more robust when it comes to sensor failures.
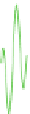
From Fig.
6.12
it is seen that the thrust force has some peaks below zero, this
means the tower is moving forward. That is, the tower experiences negative