Environmental Engineering Reference
In-Depth Information
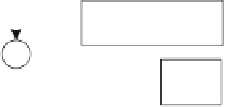
Fig. 5.4 Baseline control
strategy in the above rated
zone
T
DTD
w
g
T
sp
+
DTD
Nominal Gen Torque
β
fa
a
Tfa
β
sp1
TFAD
β
sp2
β
sp3
+
ew
g
β
col
Filters
PI
+
-
β
col
Nominal Gen Speed
regulation of the generator speed and reducing the loads in the wind turbine. The
corresponding steady-state collective pitch angle in the operating points where the
collective pitch PI controllers are designed are 6.42 and 18.53 respectively.
Next, some series notch filters are included in the regulation loop to improve the PI
controller response [
26
]. Classical design criteria [
27
] are established to tune these
controllers in these operating points, for instance: output sensitivity peak of 6 dB
approximately, open loop phase margin between 30 and 60, open loop gain
margin between 6 and 12 dB and keeping constant the PI zero frequency.
Finally, a Tower Fore-Aft Damping filter (TFAD) is designed to reduce the
wind effect in the tower fore-aft first mode in the above rated power production
zone [
28
]. For the Upwind baseline controller, the filter (Eq.
5.6
) consists of a gain
with one integrator, a pair of complex poles and a pair of complex zeros. The input
of the TFAD is the fore-aft acceleration measured in the tower top a
Tfa
and the
output is the pitch contribution b
fa
to the collective pitch angle. For the designed
TFAD, K
TD
is 0.035, w
T1
is 1.25 rad/s, 1
T1
is 0.69, w
T2
is 3.14 rad/s and 1
T2
is 1.
þ
s
2
w
T1
0
@
1
A
a
Tfa
ð
s
Þ
1
þ
21
T1
s
=
w
T1
b
fa
ð
s
Þ¼
K
TD
1
s
þ
s
2
w
T2
ð
5
:
6
Þ
1
þ
21
T2
s
=
w
T2
As Fig.
5.4
shows, the individual pitch angle set-point to each blade b
sp1
, b
sp2
and b
sp3
are equals and they are made up of the control signals b
fa
and b
col,
and the
generator torque set-point T
sp
is obtained adding the nominal generator torque in
above rated and the torque contribution of the DTD filter T
DTD
.
5.3 Design of Robust Controllers
The robust control design process for load reduction in wind turbines is shown in
Fig.
5.5
. The robust control techniques applied are based on the H
?
norm
reduction and gain scheduling interpolation. Initially, the non-linear model is
linealized to extract the family of linear models. Next, the modal analysis is carried
out to analyze the structural and non-structural modes of the system.