Environmental Engineering Reference
In-Depth Information
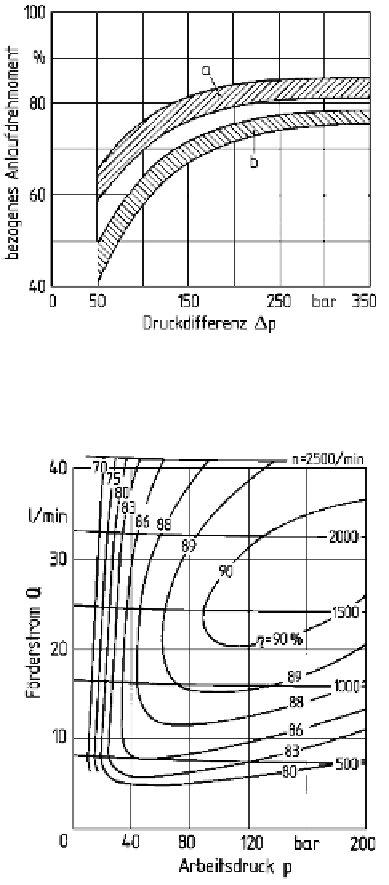
Anlaufmomente von Hydromotoren.
Hydromotoren müssen z. B. bei hy-
drostatischen Fahrantrieben unter Last
anlaufen, insbesondere Axialkolben-
maschinen,
Bild 3.35
.
Deren Anlauf-
verhalten wird nach [3.7] über der
Druckdifferenz wiedergegeben. Das
tatsächliche Anlaufdrehmoment wurde
auf das nach Gl. (2.22) berechnete
verlustlose Moment bezogen.
Wegen der so großen Kolbenreibung
[2.50] schneiden die Schrägscheiben
-
Axialkolbenmaschien (b) mäßig ab.
Daher wird Bauart (a) als Motor be-
vorzugt. Aktuelle Werte von b sind
vermutlich etwas günstiger. Im Be-
trieb sind sie höher, wenn ein Motor
nach dem Lauf nur kurze Zeit still
steht (noch Öl im Kolbenspalt).
Bild 3.35:
Anlaufdrehmomentverhalten von
drei Schrägachsen-Axialkolbenmotoren (a)
und fünf Schrägscheiben-Axialkolbenmoto-
ren (b) nach Causemann (1972) [3.7]
Betriebskennfelder.
Sie geben die
Wirkungsgrade (und z. T. auch weite-
re Größen) in Abhängigkeit von Dreh-
zahl und Druck und ggf. auch von der
Hubvolumeneinstellung an. Die Ölvis-
kosität sollte vermerkt ein.
Bild 3.36
zeigt ein Kennfeld [3.15] für
die in Bild 3.18 dargestellte Außen-
zahnradmaschine. Der beste Wir-
kungsgrad von 90% ist für Zahnrad-
pumpen mit Spaltausgleich guter
Durchschnitt. Gute Werte im oberen
Druckbereich (max. 250 bar) und fla-
che
Q
-Kennlinien zeigen hier sehr ge-
ringe volumetrische Verluste an.
Bild 3.36:
Gemessenes Betriebskennfeld
für die in Bild 3.18 gezeigte Außenzahn-
radpumpe (Bosch „Buchsenpumpe“) [3.15].
Öltemperatur 60 °C, kinematische Viskosi-
tät 20 cSt = 20 mm
2
/s
Die mechanische Antriebsleistung er-
gibt sich aus der hydrostatischen Leis-
tung, Gl. (2.24), dividiert durch den
abgelesenen Wirkungsgrad, Gl. (3.8).