Information Technology Reference
In-Depth Information
a
b
6
60
5
50
4
40
3
30
2
20
1
10
0
0
−1
−10
−2
−20
−3
−4
−30
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
time (sec)
time (sec)
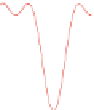
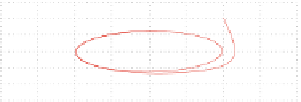
Fig. 4.11
Synchronization in the model of the two coupled FitzHugh-Nagumo neurons (
a
)
between state variables x
1
(master neuron) and x
3
(slave neuron), (
b
) between state variables x
2
(master neuron) and x
4
(slave neuron)
a
b
30
0.4
20
1
0.2
10
0
0
0
−10
−0.2
−1
−20
−0.4
−30
10
20
30
40
10
20
30
40
−4
−3
−2
−1
0
1
2
3
4
time (sec)
time (sec)
x1
30
4
20
0.5
2
10
0
0
0
−10
−2
−0.5
−20
−4
−30
10
20
30
40
10
20
30
40
−4
−3
−2
−1
0
1
2
3
4
x3
time (sec)
time (sec)
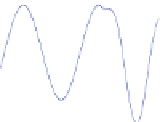
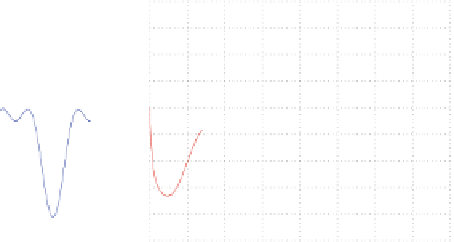
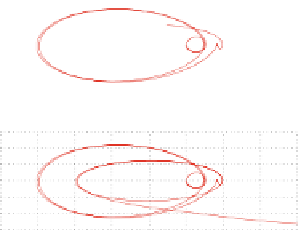
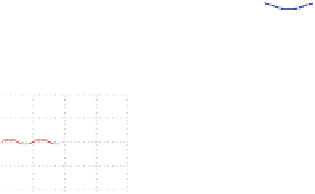
Fig. 4.12
Phase diagrams of the synchronized FitzHugh-Nagumo neurons (
a
) between state
variables x
1
-x
2
(master neuron) and between x
3
-x
4
(slave neuron), (
b
) estimation of disturbances
affecting the master neuron (state variables
z
5
and
z
6
) and the slave neuron (state variables
z
7
and
z
8
)
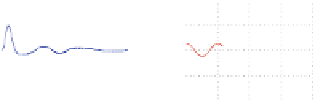
about the succeeded synchronization. Finally, in Figs.
4.10
b,
4.12
b, and
4.14
bthe
estimates of the disturbances terms affecting the neurons' model are provided. It
can be noticed that the Kalman Filter-based observer provides accurate estimates
about the non-measurable disturbances and this information enables the efficient
compensation of the perturbations' effects.