Information Technology Reference
In-Depth Information
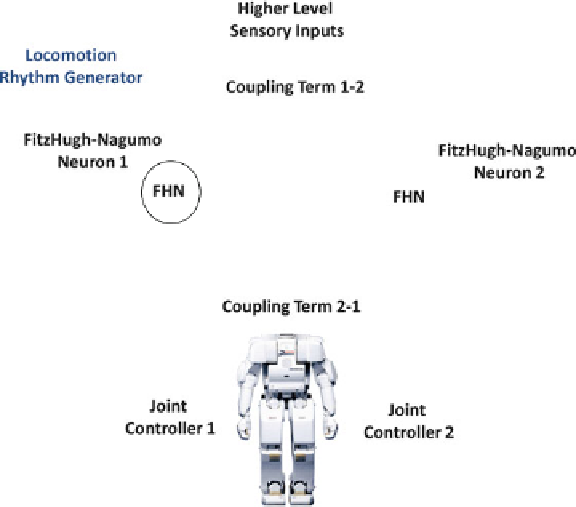
Fig. 4.7
Models of coupled neural oscillators in engineering: FitzHugh-Nagumo neurons for
controlling robot's motion
derivatives, i.e. y
i
D .
w
;
w
;
w
; ;
w
.˛
i
/
/; i D 1; ;msatisfying the following
two conditions [
58
,
157
,
200
]: (1) There does not exist any differential relation of
the form R.y; y; ;y
.ˇ/
/ D 0 which implies that the derivatives of the flat output
are not coupled in the sense of an ODE, or equivalently it can be said that the flat
output is differentially independent, (2) All system variables (i.e., the elements of
the system's state vector
w
and the control input) can be expressed using only the
flat output y and its time derivatives
w
i
D
i
.y; y; ;y
.
i
/
/; i D 1; ;s.
4.8.2
Conditions for Applying Differential Flatness Theory
The following generic class of nonlinear systems is considered
x D f.x;
u
/
(4.24)
Such a system can be transformed to the form of an affine in the input system by
adding an integrator to each input [
25
]
x D f.x/C
P
iD1
g
i
.x/
u
i
(4.25)