Information Technology Reference
In-Depth Information
Table 11.1
Some angles for data sampling
1st
2nd
3rd
4th
5th
6th
7th
8th
9th
10th
180
205
155
230
130
255
105
280
80
305
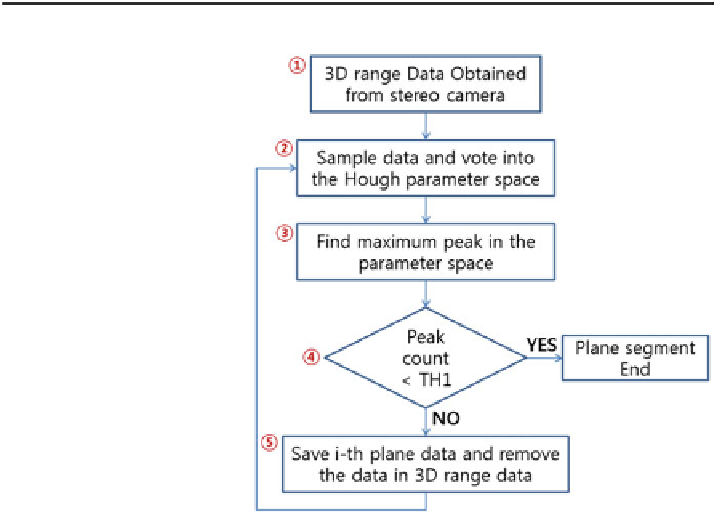
Fig. 11.7 The method of
plane segment using IRHT
Because many samplings are required for accurate plane detection, the rotation
of three vertices must be repeatedly calculated. Also, we may fail to get the 3D
coordinates from the measurement error of the sensor system after a rotation for
the original three points. In this case, we try to get the 3D coordinates from another
angle. Table
11.1
shows sequential attempts of a few rotation angles.
Therefore, we can previously save the calculated result of trigonometric
function into the LUT (Look up table) to avoid repeated calculation of the func-
tions. Although additional memory is necessary for building the LUT, it is
indispensable for real-time algorithmic processing.
11.3.4 Plane Segmentation
IRHT (Iterative Randomized Hough Transform) [
11
] is introduced for plane
segmentation. Figure
11.7
presents the plane segmentation steps. IRHT is a seg-
mentation method using sequential elimination of maximum peak data from whole
image to reduce the influence of noises and other candidate shapes.
In step , the 3D range data is obtained from the stereo camera. The q, h, and u
values of the sampled data are voted into Hough parameter space, as in step `.

Search WWH ::

Custom Search