Information Technology Reference
In-Depth Information
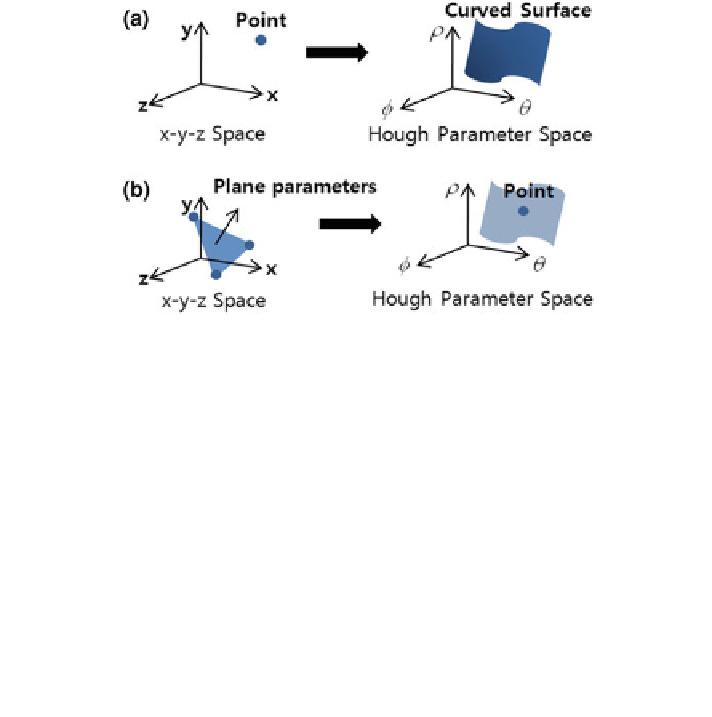
Fig. 11.1 Comparison of HT and RHT. a For Hough transform, a point in xyz space is
transformed to a curved surface in Hough parameter space; b For randomized HT, plane
parameters in xyz space are transformed to a point in Hough parameter space. Three points in 3D
space can represent a plane via Eq. (
11.1
). The 3D point (x, y, z) is on the plane, the parameters A,
B, C represent the normal vector of the plane and D is the scale of the normal vector
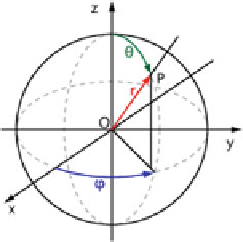
Fig. 11.2 Spherical
coordinate system
Conversely, the Cartesian coordinates may be retrieved from the spherical
coordinates by Eq. (
11.5
).
x ¼ q sin h cos u
;
y ¼ q sin h sin u
;
z ¼ q cos h
ð
11
:
5
Þ
11.3 Multiple Plane Detection
11.3.1 Planarity Evaluation from Sampling of Triangular
Point Sets
The 3D range data is the coordinate information, measured from the camera origin,
of various planar and nonplane surfaces in 3D, including many noises and outliers.
The random sampling method of the conventional RHT votes for Hough parameter
Search WWH ::

Custom Search