Information Technology Reference
In-Depth Information
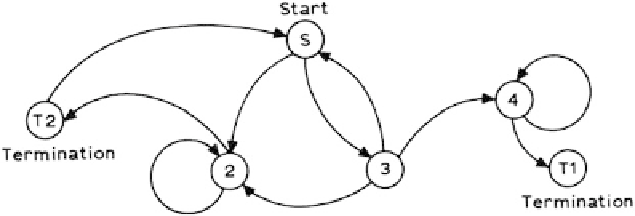
Fig. 10.2
States and transformations in a problem space
The model is referred to as the knowledge of the 'Expert'. The model is derived
from the knowledge acquisition results provided by the 'knowledge engineer' and
these results are interpreted by the designer in terms of the 'Theory' (Fig.
10.1
;
'Knowledge 1'). The process of deriving the model from the 'Theory' depends
upon 'Abduction' and 'Abstraction' (formerly called type 2 and type 1 abduction
respectively—Addis
1987
). The model is a 'Case' (an element of the extension) of the
theory of knowledge given in terms of some representation scheme ('Knowledge 2').
The model is driven by deductive inference and controlled by heuristics (Abduction
type 3) towards a chosen goal. Induction uses the results of the model and ob-
servations to either, confirm (justify) the model or to stimulate further action and
design.
Knowledge-based systems provide possible intellectual assistance through the
animation and automation of representations (vehicles of thought). In order to build
better aids to thought we need a better grasp of what is involved in the human use of
representations (so we can automate aspects of that use). The account, as is normally
assumed in AI, is based upon problem solving as portrayed by Newell and Simon
(
1956
). This theory (of knowledge) is a derivative of a human problem-solving model,
an example (a case) of which was first implemented as the Logic Theory Machine
(LTM). The LTM was later extended to a General Problem Solver (GPS). This theory
was proposed in order to describe the general behavior of people reporting on their
thought processes as they were solving problems (Newell and Simon
1973
).
In essence, the theory states that problem solving is a process of exploring a
“problem space” for a solution. A problem space can be considered as a directed
graph (see Fig.
10.2
). The nodes of the graph represent the different possible states
of a problem. There is usually a single start state that indicates the initial situation
and a set of termination states that indicate the desired result. The arrows that go
from node to node represent the actions that are available to an agent in that state, and
these actions transform the problem from one state to the next. Problem solving is the
discovery of a path from the start state (S) to one of the termination states (T1, T2).
The solution is the sequence of transformations (arcs) that make up the path.
The theory has its foundations in utility theory (Luce and Raiffa
1957
). Utility
theory is a means through which choices can be assessed (their utility) and decisions
can be made. The utility of a state in Newell and Simon's version of decision theory