Information Technology Reference
In-Depth Information
Throttle Angle
Air Flow System
M
AFS
Mass Air
Flow
a
tr
Injection Time
f
fl
Injection System
M
FS
t
in
Injection Time
and
Ignition Time
Actuation System
M
IIA S
t
in
f
fl
s
en
Ignition Time
Ignition System
M
IS
Ignition System
M
IS
t
ig
Engine Speed
t
ig
Component Structure
Specification (Data Semantics)
Data
Ignition System
Name
Type
Unit
Datatype
...
Parameters
-1
s
en
in
min
int16
...
...
Properties
Inputs
Outputs
f
fl
(
(
0<=
s
ig
<=6400
50<=t
ig
<=150
AND
)
)
0<=f
ig
<=100
(
(
0<=
s
ig
<=6400
50<=t
ig
<=150
AND
)
0
<=
s
i
i
ig
<=
6
6
6
64
0
0
0
00
50<=t
ig
<=150
A
ND
0<=f
ig
<=100
0
<=
f
i
i
ig
<=
1
1
1
100
)
IMPLIES
(
)
(
0<=
s
en
<=6400
50<=t
ig
<=150
AND
0<=
f
fl
<=100
)
IMPLIES
IMPLIES
(
(
)
)
s
en
t
ig
IMPLIES
(
)
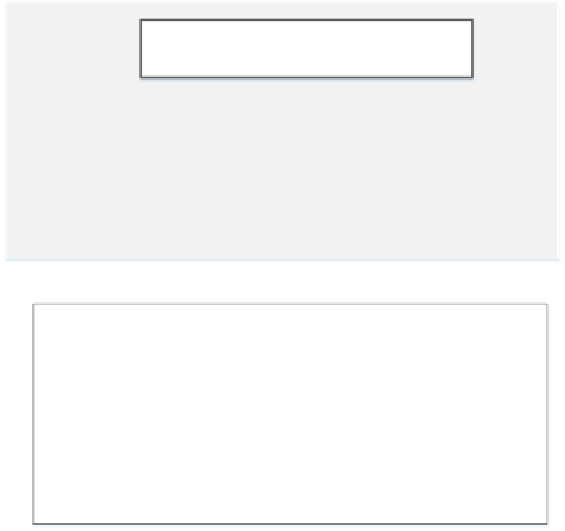
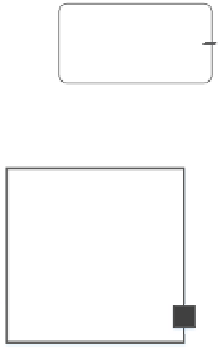
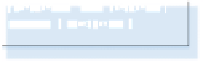
Fig. 1
Motivating example: a component-based system of automotive engine control func-
tion, adopted from (Frey (2010)) (top), and detailed view of the component Ignition System
(structure and specification, bottom)
to decide when to activate the tasks of the fuel injection and ignition (Frey (2010)).
To do this, the application takes the sensed values of the air flow volume, current
speed and some parameters computed from the driver's pedal position. In a typical
automotive development process
2
, the system structure from figure is made based
on stepwise decomposition of top-level requirements, having several intermediate
steps such as the functional and technical system architecture with several levels in
the hierarchy. Let us assume now that involved components are already developed,
eventually for the complete car product line, and are stored in some repository. Let
us further assume that we have a top-level requirement with regard to the engine
timing for particular car type, which states the following:
The minimal allowed time delay between the task of the fuel injection and ignition
shall be greater than 40 ms.
The main contributors to this requirement are software components
M
AFS
,
M
FS
,
M
IS
,
M
IIAS
, and their execution platform (e.g. concrete mapping of components on
real-time tasks, task configurations, and other). In order to satisfy this timing prop-
erty, the developer has to analyze the specification for each component in order to
find the influence of the component behaviour on that property. The example of such
2
Note that we do not limit our approach to automotive domain.




































Search WWH ::

Custom Search