Information Technology Reference
In-Depth Information
θ
dw
=
k
J
−
1
(
ξ
d
−
ξ
)+
θ
w
,
(3.18)
where
ξ
d
is the coordinates of the target in the image plane,
ξ
is the coordinate of
the tip of the tweezers in the image plane, and
k
is constant.
Using this equation, we can calculate the desired angle of the wrist joint. When
the tip of the tweezers touches the table plane where the target is placed, the impact
is absorbed by the passive joint, and the tip of the tweezers can move along the sur-
face of the table plane. In this condition, the image Jacobian
J
is changed because of
the change in kinematics of the grip. Although the speed of convergence is changed,
tracking is achieved in most cases because of robustness of the visual servoing.
In order to improve the speed of convergence, the feedback gain is changed as
k
+
a
b
∂ξ
t
∂
k
←
−
,
(3.19)
x
where
∂ξ
t
∂
x
is the rate of change of image feature, and
a
,
b
are constant coefficients.
It corresponds to the tracking speed of the tweezers, and the gain is automatically
adjusted.
3.3.3
Experiments
The multifingered hand has three fingers [7]. The middle finger has 2 DOF, and the
other fingers have 3 DOF, and the hand has 8 DOF in total. Each finger can close at
180 deg per 0
1 s. The hand is mounted on the 2-axis wrist mechanism. The vision
system uses a high-speed camera Basler A504k. It takes 8 bit gray scale images and
the maximum speed is 500 fps by 1280
.
1024 resolution.
We used a single rice grain as a target; its long axis is about 5 mm and its
short axis is about 3 mm. Figure 3.12 shows the continuous photographs of total
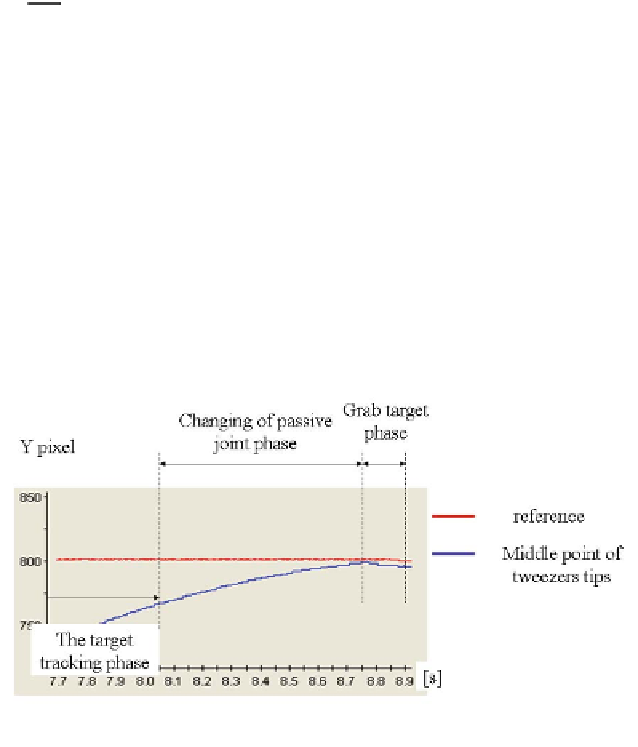
processes. Figure 3.13 shows the part of the target tracking of tweezers to the target.
×
Fig. 3.13
Time response [5]

Search WWH ::

Custom Search