Information Technology Reference
In-Depth Information
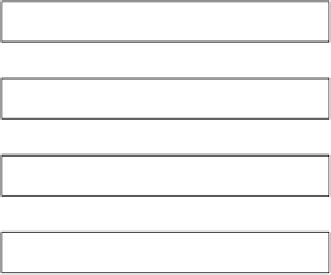
Fig. 19.4
Aflowdiagram
outlining the proposed vi-
sual servo control system.
The initial state
q
(0) is given
(1)
Image Feature Extraction
(2)
Image Feature Selection
(3)
Update of the State
(4)
Control Input Calculation
(5)
Image Feature Estimation
19.7
Controller Design
The goal here is to achieve
q
ref
(
k
)
q
(
k
)
→
(19.29)
where
q
ref
(
k
)=
x
ref
(
k
)
y
ref
(
k
)
z
ref
(
k
)
ref
(
k
)
φ
(19.30)
is a given reference. We define
q
1
(
k
)
q
2
(
k
)
q
3
(
k
)
q
4
(
k
)
=
R
(
q
ref
(
k
))
(
k
))(
q
(
k
)
φ
−
(19.31)
where
⎡
⎣
⎤
⎦
.
cos
φ
sin
φ
00
−
sin
φ
cos
φ
00
R
(
φ
)=
(19.32)
0
0
1 0
0
0
0 1
The rest of this section describes normal tracking control, take-off control and
landing control methods.
For normal tracking control, the control signals are given by a set of PID con-
trollers of the form































Search WWH ::

Custom Search