Information Technology Reference
In-Depth Information
f
d
f
i
x
2
x
i
x
1
x
d
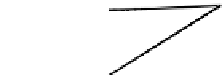
Fig. 18.9
Unconstrained optimal path for Region I in the image plane
feature along the path and are the initial and final feature position for the intermedi-
ate straight path.
The optimal feature path for the
Region III
is depicted in Figure 18.10 and it is
determined solving the following equation
Ω =
arctan
I
x
1
α
x
arctan
I
x
i
α
x
+
−
+
x
b
α
x
ln
I
y
2
+
arctan
I
x
d
α
x
arctan
x
b
α
x
−
,
I
y
3
where the second addendum in the second member corresponds to the angle vari-
ation of the robot's orientation
θ
during the spiral path.
x
b
is the horizontal image
bound.
Finally, the optimal feature paths that correspond to the regions
IV,V,VI
or
VII
are plotted in Figure 18.11. The solution in this case is given by
=
arctan
I
x
1
α
x
arctan
I
x
i
α
x
+
x
b
α
x
ln
I
y
2
+
Ω
−
I
y
3
+2
x
b
α
x
ln
I
y
3
+
arctan
I
x
d
α
x
arctan
x
b
α
x
−
.
I
y
4
Notice that, for each
I
y
4
, there exists a valid image path. To disambiguate, the
choice of the optimal path in this last case can be done only by the use of its 3-D
reconstruction (since both the path
T
1
−
T
2
P
or
SL
−
T
1
−
T
2
P
are feasible). It is



































Search WWH ::

Custom Search