Information Technology Reference
In-Depth Information
C
∞
([0
k
)
v
∈
,
S
]
,
R
C
∞
([0
n
)
q
∈
,
S
]
,
R
Current
trajectory
n
η
∈
R
0
Controller
senso
r
s
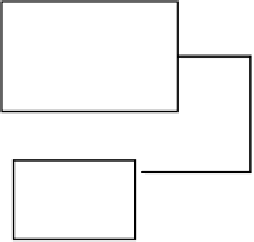
Fig. 17.1
A trajectory deformation process can be modelled as a dynamic control system
of time τ. At each time, the state is a feasible trajectory
q
, the input is a pair (η
0
,
v
)that
uniquely defines the time derivative of the state. The trajectory deformation algorithm we
describe in this chapter can be considered as a closed-loop controller that computes the input
of the dynamic control system with respect to the current trajectory and a task to achieve, for
instance avoiding obstacles, based on perceptual data
For each value of
0) is called the
initial
trajectory
. In order to keep notation light and intuitive, we use the same nota-
tion
q
to denote configurations, trajectories and trajectory deformations. We are
interested in deformations
q
(
s
τ
,
s
→
q
(
s
,
τ
) is a trajectory.
s
→
q
(
s
,
) composed of only admissible trajectories. Such
deformations satisfy the following constraint: there exists a
k
-dimensional vec-
tor valued smooth mapping
u
=(
u
1
,...,
,
τ
u
k
) defined over [0
,
S
]
×
[0
,
∞
) such that
∀
,
τ
∈
,
×
,
∞
(
s
)
[0
S
]
[0
)
k
i
=1
u
i
(
s
,
τ)
X
i
(
q
(
s
,
τ))
.
∂
q
s
(
s
,
τ
)=
(17.2)
∂
→
,
τ
→
,
τ
For each value of
).The
above equation simply expresses constraint (17.1) for each trajectory of the defor-
mation. As well as a trajectory is uniquely defined by the initial configuration and
the input function, a trajectory deformation is uniquely defined by the initial config-
uration
q
(0
τ
,
s
u
(
s
) is the input function of trajectory
s
q
(
s
).
By differentiating (17.2), we get a relation between the input variation
∂
u
∂τ
,
τ
) of each trajectory and by input functions
u
i
(
s
,
τ
and the infinitesimal trajectory deformation when the deformation parameter
τ
increases:
∂
)
2
q
k
i
=1
∂
u
i
∂τ
)
∂
X
i
∂
))
∂
q
∂τ
(
s
,
τ
)=
(
s
,
τ
)
X
i
(
q
(
s
,
τ
)) +
u
i
(
s
,
τ
q
(
q
(
s
,
τ
(
s
,
τ
∂
s
∂τ
We call respectively
input perturbations
and
direction of deformation
the following
vector valued functions:









Search WWH ::

Custom Search