Information Technology Reference
In-Depth Information
The control
C
allows to fully decouple translational and rotational motions. How-
ever, the computation of the 3D features
ρ
i
ρ
i
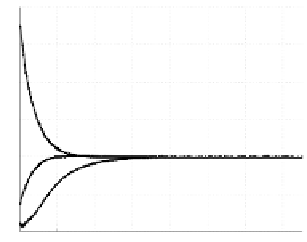
increase the sensitivity of the control
scheme to measurement noise as it can be observed in Figure 16.5 (see between
200
th
and 300
th
iterations). The control law
D
provides very nice decoupling prop-
erties (refer to Figure 16.6). In this case, translational velocities are directly related
to the visual features (used to control the translational DOF) through a constant
diagonal matrix. Furthermore, it can be observed that this control scheme is less
sensitive to noise measurement than the previous one.
(a)
(b)
1
0.2
0
0.15
−1
0.1
−2
−3
0.05
−4
0
−5
−0.05
−6
−0.1
−7
200
400
600
800
1000
1200
1400
200
400
600
800
1000
1200
1400
(c)
(d)
0
0.3
0.2
0.1
0
−50
−0.1
−0.2
−0.3
−0.4
−100
−0.5
−0.6
−0.7
−0.8
−150
200
400
600
800
1000
1200
1400
200
400
600
800
1000
1200
1400
(e)
(f)
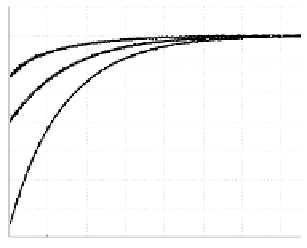
Fig. 16.6 D
, scaled 3D point-based visual servoing: (a) initial image; (b) desired image and
image-points trajectories; (c) translational velocities in
m
/
s
; (d) rotational velocities in
deg
/
s
;
and (e) error vector components



























































Search WWH ::

Custom Search