Information Technology Reference
In-Depth Information
16.2.1
Generic Projection Model
Central imaging systems can be modeled using two consecutive projections: spher-
ical projection succeeded by a perspective one. This geometric formulation called
unified model has been proposed by Geyer and Daniilidis in [9] and has been inten-
sively used by the vision and robotics community (structure from motion, calibra-
tion, visual servoing,
etc
).
Consider the virtual unitary sphere centered in the origin of the mirror frame
F
m
as shown in Figure 16.1 and the perspective camera centered in the origin of the
camera frame
F
c
. Without lost of generality, a simple translation of
−
ξ
, along the
Z
axis of the mirror frame, between
F
m
and
F
c
is considered. Let
X
be a 3D
point with coordinates
X
=[
XYZ
]
in
is projected in the
image plane into the point of homogeneous coordinates
x
i
=[
x
i
y
i
1]
.Theimage
formation process can be split in three steps given in the following:
F
m
. The world point
X
•
the 3D world point
X
is mapped onto the unit sphere surface:
XYZ
1
ρ
,
X
s
=
(16.1)
=
√
X
2
+
Y
2
+
Z
2
;
where
ρ
=
X
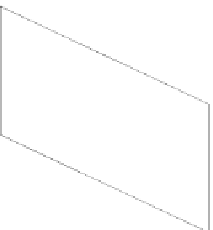
Fig. 16.1
Unified central projection and two views geometry
























































Search WWH ::

Custom Search