Information Technology Reference
In-Depth Information
1
0.8
0.6
0.4
0.2
0
2
1.5
2
1.5
1
1
0.5
0.5
0
0
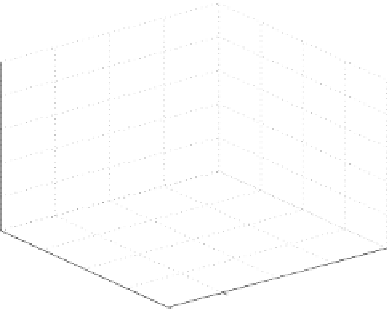
Fig. 14.8
Cost function used for visual-occlusion avoidance in the image space
distance
40
35
30
25
20
15
10
5
0
0
5
10
15
20
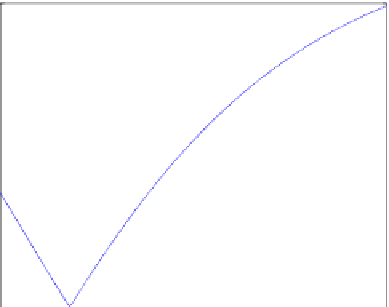
Fig. 14.9
Distance between the occluding point and target without occlusion avoidance
V
occ
=
d
x
e
−
β
d
2
−
2
β
∇
.
(14.42)
d
y
e
−
β
d
2
−
2
β
The artificial force that avoids the occlusions can be now computed using (14.28).
The transformation from the image space to the articular space is given by:
∂Φ
∂
+
r
∂
r
g
occ
=
∇
Φ
V
occ
=
(
L
Φ
MJ
q
)
+
∇
Φ
V
occ
−
−
,
(14.43)
∂
q
where
r
is the chosen camera pose parametrization,
M
and
J
q
are the transformation
matrices defined before, and
L
Φ
is the well-known interaction matrix related to the
image point
x
a
.
































































































































































































































Search WWH ::

Custom Search